引力波天文系列文章将介绍引力波能观测到什么,如何观测,以及基本的数据分析方法。侧重于引力波的空间探测和分析,但核心的测量原理、仪器响应以及数据分析方法基本都是通用的。
本文介绍通过激光干涉探测引力信号的基本原理,具体关注探测器对信号的响应函数以及灵敏度曲线。
参考系的选取
引力波的物理效应体现为时空固有距离(时间) 的改变,其具体描述通常涉及两个参考系:TT参考系(TT frame)和探测器的固有参考系(proper detector frame)。这里简单介绍,详细分析可参考Maggiore(2007)的 1.3 及 9.1 小节。
广义相对论中,数学上对于坐标规范的选择,对应于物理上对于观测者的选取。TT规范下引力波具有简单描述,其所对应的参考系即为TT参考系。TT参考系中(在h μ ν h_{\mu\nu} h μ ν 坐标时与固有时相同 。这是因为TT参考系的坐标刻度会随引力波而伸缩,使得静止粒子空间“坐标”值始终不变。建立TT参考系,最简单的就是直接用静止测试粒子本身标记坐标,这种选择下,坐标量不体现引力波效应,只有固有量才能描述。
TT参考系中引力波形式简单,但参考系本身波动而坐标量不变,与观测直觉相悖,与之相对,探测器的固有参考系则更便于描述实验。探测器固有参考系即跟随探测器的局部惯性系(freely falling frame),在该参考系下坐标刻度本身是静态的,自由测试粒子坐标随引力波而波动。在h h h r / λ r/\lambda r / λ h μ ν h_{\mu\nu} h μ ν 在固有参考系中计算TT规范下的引力波 。
固有参考系描述是局域近似,时空平直而引力波对应额外牛顿力;TT参考系中引力波始终为背景扰动存在,没有局部空间的限制。前者适用于长波近似,仅在x / λ x/\lambda x / λ s ¨ i = 1 2 h ¨ i j s j \ddot{s}_i = \frac{1}{2}\ddot{h}_{ij} s_j s ¨ i = 2 1 h ¨ i j s j
基本探测原理
长波近似结论
h ( t , r ⃗ ) = h r ⃗ = 0 ( t − k ^ ⋅ r ⃗ / c ) = ∫ h ~ ( f ) e i 2 π f ( t − k ^ ⋅ r ⃗ c ) h(t, \vec{r}) = h_{\vec{r}=0}(t-\hat{k}\cdot \vec{r}/c) = \int \tilde{h}(f) e^{i2 \pi f(t-\hat{k}\cdot\frac{\vec{r}}{c})}
h ( t , r ) = h r = 0 ( t − k ^ ⋅ r / c ) = ∫ h ~ ( f ) e i 2 π f ( t − k ^ ⋅ c r )
当L ≪ λ / 2 π , 2 π f ≪ c L L \ll \lambda/2\pi, 2\pi f \ll \frac{c}{L} L ≪ λ / 2 π , 2 π f ≪ L c 2 π f k ^ ⋅ r ⃗ c ≪ 1 2 \pi f \hat{k}\cdot\frac{\vec{r}}{c} \ll 1 2 π f k ^ ⋅ c r ≪ 1 h ( t , r ⃗ ) h(t, \vec{r}) h ( t , r ) h ( t ) h(t) h ( t ) 引力波的传播 效应),被称为长波近似 。但电磁波的传播 过程,即不同时刻的引力波信号差异仍需要考虑。
d s 2 = g μ ν d x μ d x ν = − c 2 d t 2 + δ i j d x i d x j + h i j d x i d x j ds^2 = g_{\mu\nu} dx^\mu dx^\nu = -c^2dt^2 + \delta_{ij}dx^i dx^j + h_{ij}dx^i dx^j
d s 2 = g μ ν d x μ d x ν = − c 2 d t 2 + δ i j d x i d x j + h i j d x i d x j
h + d x 2 − h + d y 2 + 2 h × d x d y h_+dx^2 - h_+dy^2 + 2h_\times dxdy
h + d x 2 − h + d y 2 + 2 h × d x d y
引力波对时空的扰动会影响光束经过测地线上两点的时间间隔,进而反映在相位测量上,这是现代引力波测量的基本原理。在平直时空中任取两点,连线方向设为x x x ( 0 , 0 , 0 ) (0,0,0) ( 0 , 0 , 0 ) ( L , 0 , 0 ) (L,0,0) ( L , 0 , 0 ) x x x d y = d z = 0 dy=dz=0 d y = d z = 0 x x x h ( t ) h(t) h ( t )
d s 2 = g μ ν d x μ d x ν = − c 2 d t 2 + [ 1 + h ( t ) ] d x 2 ds^2 = g_{\mu\nu} dx^\mu dx^\nu = -c^2dt^2 + [1+h(t)]dx^2
d s 2 = g μ ν d x μ d x ν = − c 2 d t 2 + [ 1 + h ( t ) ] d x 2
这里暂时只考虑x x x h + ( t ) h_+(t) h + ( t ) h ( t ) h(t) h ( t ) d s 2 = 0 ds^2 = 0 d s 2 = 0 x x x c d t = 1 + h + ( t ) d x c dt = \sqrt{1 + h_+(t)}dx c d t = 1 + h + ( t ) d x
c ( t r e c v − t e m i t ) = ∫ t e m i t t r e c v c d t = ∫ 0 L 1 + h [ t ( x ) ] d x ≈ ∫ 0 L { 1 + 1 2 h [ t ( x ) ] } d x c(t_{\rm recv} -t_{\rm emit}) = \int_{t_{\rm emit}}^{t_{\rm recv}} c dt = \int_0^L \sqrt{1 + h[t(x)]}dx \approx \int_0^L \left\{1 +\frac{1}{2}h[t(x)]\right\}dx
c ( t r e c v − t e m i t ) = ∫ t e m i t t r e c v c d t = ∫ 0 L 1 + h [ t ( x ) ] d x ≈ ∫ 0 L { 1 + 2 1 h [ t ( x ) ] } d x
这里利用h ( t ) ≪ 1 h(t) \ll 1 h ( t ) ≪ 1
t r e c v ≈ t e m i t + L c + 1 2 c ∫ 0 L h [ t ( x ) ] d x t_{\rm recv} \approx t_{\rm emit} + \frac{L}{c} + \frac{1}{2c} \int_0^L h[t(x)] dx
t r e c v ≈ t e m i t + c L + 2 c 1 ∫ 0 L h [ t ( x ) ] d x
最后一项为引力波引入的修正,但积分反过来又依赖自身t ( x ) t(x) t ( x ) t ( x ) = t e m i t + x c t(x) = t_{\rm emit} + \frac{x}{c} t ( x ) = t e m i t + c x
t r e c v ≈ t e m i t + L c + 1 2 c ∫ 0 L h ( t e m i t + x c ) d x = t e m i t + L c + 1 2 ∫ t e m i t t e m i t + L c h ( t ) d t t_{\rm recv} \approx t_{\rm emit} + \frac{L}{c} + \frac{1}{2c} \int_0^L h\left(t_{\rm emit} + \frac{x}{c}\right) dx = t_{\rm emit} + \frac{L}{c} + \frac{1}{2} \int_{t_{\rm emit}}^{t_{\rm emit} + \frac{L}{c}} h(t) dt
t r e c v ≈ t e m i t + c L + 2 c 1 ∫ 0 L h ( t e m i t + c x ) d x = t e m i t + c L + 2 1 ∫ t e m i t t e m i t + c L h ( t ) d t
最后一项为引力波引入的一阶修正,进一步迭代所引入的高阶修正量为o ( h 2 ) o(h^2) o ( h 2 )
Δ t = t − t e m i t − L c = 1 2 ∫ t − L c t h ( τ ) d τ Δ L = c Δ t = c 2 ∫ t − L c t h ( τ ) d τ \boxed{\begin{aligned}
\Delta t &= t - t_{\rm emit} - \frac{L}{c} = \frac{1}{2} \int_{t-\frac{L}{c}}^{t} h(\tau) d\tau\\
\Delta L &= c\Delta t =\frac{c}{2} \int_{t-\frac{L}{c}}^{t} h(\tau) d\tau
\end{aligned}} Δ t Δ L = t − t e m i t − c L = 2 1 ∫ t − c L t h ( τ ) d τ = c Δ t = 2 c ∫ t − c L t h ( τ ) d τ
考虑到相位测量是在接收端进行,这里调整了积分限,并将t r e c v t_{\rm recv} t r e c v t t t
φ r e c v ≈ φ e m i t + 2 π ν 0 L c + 2 π ν 0 Δ t \varphi_{\rm recv} \approx \varphi_{\rm emit} + 2\pi\nu_0\frac{L}{c} + 2\pi\nu_0\Delta t
φ r e c v ≈ φ e m i t + 2 π ν 0 c L + 2 π ν 0 Δ t
其中2 π ν 0 Δ t 2\pi \nu_0 \Delta t 2 π ν 0 Δ t ν 0 \nu_0 ν 0 L ≪ λ L \ll \lambda L ≪ λ h ( t ) h(t) h ( t ) Δ L = 1 2 L h ( t ) ∝ h ( t ) \Delta L = \frac{1}{2} L h(t) \propto h(t) Δ L = 2 1 L h ( t ) ∝ h ( t )
对于单频信号,取h ( t ) = h 0 e − i ω t h(t) = h_0 e^{-i\omega t} h ( t ) = h 0 e − i ω t
Δ t = 1 2 ∫ t − L c t h 0 e − i ω τ d τ = h 0 2 1 − i ω e − i ω τ ∣ t − L c t = h 0 2 1 − i ω e − i ω t [ 1 − e i ω L c ] = h 0 e − i ω t e i ω L 2 c sin ( ω L 2 c ) ω \begin{aligned}
\Delta t &= \frac{1}{2} \int_{t-\frac{L}{c}}^{t} h_0 e^{-i\omega \tau} d\tau = \frac{h_0}{2} \frac{1}{-i\omega} e^{-i\omega \tau}\Big|_{t-\frac{L}{c}}^{t} \\
&= \frac{h_0}{2} \frac{1}{-i\omega} e^{-i\omega t} \left[1 - e^{i\omega \frac{L}{c}}\right]\\
& = h_0 e^{-i\omega t} e^{i\omega \frac{L}{2c}} \frac{\sin(\omega \frac{L}{2c})}{\omega}
\end{aligned} Δ t = 2 1 ∫ t − c L t h 0 e − i ω τ d τ = 2 h 0 − i ω 1 e − i ω τ ∣ ∣ ∣ ∣ t − c L t = 2 h 0 − i ω 1 e − i ω t [ 1 − e i ω c L ] = h 0 e − i ω t e i ω 2 c L ω sin ( ω 2 c L )
简单整理有:
Δ t = L 2 c h ( t − L 2 c ) s i n c ( ω L 2 c ) \boxed{\Delta t = {\small \frac{L}{2c}} ~ h(t-{\textstyle \frac{L}{2c}}) ~ {\rm sinc}(\omega {\textstyle \frac{L}{2c}})}
Δ t = 2 c L h ( t − 2 c L ) s i n c ( ω 2 c L )
这里s i n c ( x ) = sin x x {\rm sinc}(x) = \frac{\sin x}{x} s i n c ( x ) = x s i n x L ≪ λ , ω L 2 c ≪ π L \ll \lambda, \omega \frac{L}{2c} \ll \pi L ≪ λ , ω 2 c L ≪ π s i n c ( ω L 2 c ) ∼ 1 {\rm sinc}(\omega \frac{L}{2c}) \sim 1 s i n c ( ω 2 c L ) ∼ 1 ω L 2 c ≳ π \omega \frac{L}{2c} \gtrsim \pi ω 2 c L ≳ π h ( t − L 2 c ) h(t- {\textstyle \frac{L}{2c}}) h ( t − 2 c L ) x x x L → 2 L L \rightarrow 2L L → 2 L
另一个方面,对前面公式两边求导有:
2 π ν ( t ) ≈ 2 π ν 0 + 2 π ν 0 Δ t ˙ = 2 π ν 0 + 2 π ν 0 1 2 [ h ( t ) − h ( t − L c ) ] 2\pi\nu(t) \approx 2\pi\nu_0 + 2\pi\nu_0\dot{\Delta t} = 2\pi\nu_0 + 2\pi\nu_0 \frac{1}{2} \Big[h(t) - h(t - {\textstyle \frac{L}{c}})\Big]
2 π ν ( t ) ≈ 2 π ν 0 + 2 π ν 0 Δ t ˙ = 2 π ν 0 + 2 π ν 0 2 1 [ h ( t ) − h ( t − c L ) ]
这里利用了变限积分的导数,假设激光发射频率稳定为ν 0 \nu_0 ν 0 ν ( t ) = φ ˙ ( t ) 2 π \nu(t) = \frac{\dot{\varphi}(t)}{2\pi} ν ( t ) = 2 π φ ˙ ( t )
ν ( t ) − ν 0 ν 0 ≈ 1 2 [ h ( t ) − h ( t − L c ) ] \boxed{\frac{\nu(t)-\nu_0}{\nu_0} \approx \frac{1}{2} \Big[h(t) - h(t - {\textstyle \frac{L}{c}})\Big]}
ν 0 ν ( t ) − ν 0 ≈ 2 1 [ h ( t ) − h ( t − c L ) ]
即接收到的激光瞬时频率相对发射端基准频率的相对偏移正比于引力波在两点的振幅差。直观理解,引力波的波峰或波谷的到达时间受到引力波调制,最终的接收频率也将随之发生变化。长波极限下,h ( t ) h(t) h ( t ) ν ( t ) − ν 0 ν 0 ≈ 0 \frac{\nu(t)-\nu_0}{\nu_0} \approx 0 ν 0 ν ( t ) − ν 0 ≈ 0 h ( t ) h(t) h ( t )
注意:臂长 (相位/时间)变化仅依赖单一时刻的引力波强度,对应(长波近似下)响应可简单写为D i j h i j D^{ij} h_{ij} D i j h i j 相对频移 则依赖两个时刻引力波信号的差值。
激光干涉测量
https://en.wikipedia.org/wiki/Interferometry https://en.wikipedia.org/wiki/Sagnac_effect https://en.wikipedia.org/wiki/Common-path_interferometer#Zero-area_Sagnac
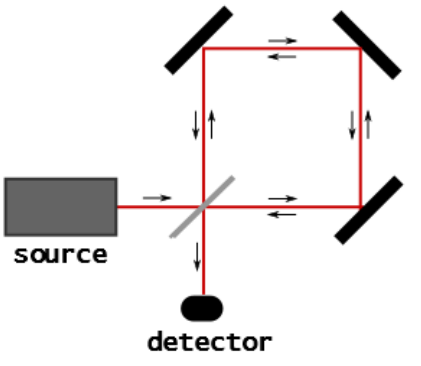
对于引力波测量而言,两种常见的激光干涉主要有迈克尔逊干涉(Michelson)和萨格纳克干涉(Sagnac)。如下图所示,两者的主要区别在于光线的传播路径:前者经过分光的两束光线走不同路径进行干涉,而后者则是经过相同路径进行干涉。
迈克尔逊干涉更为知名,当前运行的aLIGO, Adv-Virgo等都属于迈克尔逊干涉。
萨格纳克效应用于激光或光纤陀螺仪
迈克尔逊干涉实验是非常著名的相对论检验实验,但萨格纳克效应
而将萨克纳克干涉用于引力波测量的想法很早就有人提出(R. W. P. Drever 1983, R.Weiss 1987, Sun et al. 1996),
萨格纳(Sagnac)原理:也称萨氏效应(相位差正比于输入角速率)。该原理适用于光纤角速率陀螺;激光角速率陀螺等。Sagnac法国物理学家(1869年~1926年),居里夫妇的朋友。1913年发明萨氏效应。
As noted above, Sagnac interferometers are, to first order, insensitive to any static or low-frequency displacement of their optical components, nor are the fringes affected by minor frequency variation in the lasers or birefringence.
insensitive to rotations while remaining sensitive to time-dependent displacement in the two arms.
外差干涉测量
两个频率接近的电磁波信号相干叠加,其电场强度可表示为(这里假设两个信号偏振方向相同):
E s cos ( ω s t + ϕ ) + E L O cos ( ω L O t ) E_s\cos(\omega_s t + \phi) + E_{\rm LO}\cos(\omega_{\rm LO} t)
E s cos ( ω s t + ϕ ) + E L O cos ( ω L O t )
在探测器进行探测时,光电感应器的响应信号与光强而非场强成正比(非线性响应),而光强
I ∝ [ E s cos ( ω s t + ϕ ) + E L O cos ( ω L O t ) ] 2 = E s 2 cos 2 ( ω s t + ϕ ) + E L O 2 cos 2 ( ω L O t ) + 2 E s E L O cos ( ω s t + ϕ ) cos ( ω L O t ) = 1 2 E s 2 [ 1 + cos 2 ( ω s t + ϕ ) ] + 1 2 E L O 2 [ 1 + cos ( 2 ω L O t ) ] + E s E L O { c o s [ ( ω s − ω O L ) t + ϕ ] + cos [ ( ω s + ω O L ) t + ϕ ] } \begin{aligned}
I \propto ~&~ [E_s\cos(\omega_s t + \phi) + E_{\rm LO}\cos(\omega_{\rm LO} t)]^2\\
=~&~ E_s^2\cos^2(\omega_s t + \phi) + E_{\rm LO}^2\cos^2(\omega_{\rm LO} t) + 2E_sE_{\rm LO}\cos(\omega_s t + \phi)\cos(\omega_{\rm LO} t)\\
=~&~ \frac{1}{2}E_s^2[1+\cos 2(\omega_s t + \phi)] + \frac{1}{2}E_{\rm LO}^2[1+\cos(2\omega_{\rm LO} t)]\\
~&~ + E_sE_{\rm LO}\big\{cos[(\omega_s-\omega_{\rm OL}) t + \phi] + \cos[(\omega_s+\omega_{\rm OL}) t + \phi]\big\}
\end{aligned} I ∝ = = [ E s cos ( ω s t + ϕ ) + E L O cos ( ω L O t ) ] 2 E s 2 cos 2 ( ω s t + ϕ ) + E L O 2 cos 2 ( ω L O t ) + 2 E s E L O cos ( ω s t + ϕ ) cos ( ω L O t ) 2 1 E s 2 [ 1 + cos 2 ( ω s t + ϕ ) ] + 2 1 E L O 2 [ 1 + cos ( 2 ω L O t ) ] + E s E L O { c o s [ ( ω s − ω O L ) t + ϕ ] + cos [ ( ω s + ω O L ) t + ϕ ] }
探测器只能探测到信号在响应时间内的积分(平均强度),考虑到光电感应器响应时间≫信号本身周期,上式中的高频项积分响应为0,从而最终的响应
∝ 1 2 ( E s 2 + E L O 2 ) + E s E L O cos [ ( ω s − ω O L ) t + ϕ ] \propto \frac{1}{2}(E_s^2+E_{\rm LO}^2) + E_sE_{\rm LO}\cos[(\omega_s-\omega_{\rm OL}) t + \phi]
∝ 2 1 ( E s 2 + E L O 2 ) + E s E L O cos [ ( ω s − ω O L ) t + ϕ ]
也可以解释为,通过低通滤波移除了所有高频信号。在目标信号与参考输入频率差值足够小时,差频(拍频)项ω s − ω O L \omega_s-\omega_{\rm OL} ω s − ω O L ω s \omega_s ω s ω L O \omega_{\rm LO} ω L O
∝ 1 2 ( E s 2 + E L O 2 ) + E s E L O cos ϕ \propto \frac{1}{2}(E_s^2+E_{\rm LO}^2) + E_sE_{\rm LO}\cos \phi
∝ 2 1 ( E s 2 + E L O 2 ) + E s E L O cos ϕ
外差干涉与零差干涉
探测器实际响应的是E s E L O E_sE_{\rm LO} E s E L O E s 2 E_s^2 E s 2 E L O E_{\rm LO} E L O
相位差值信息得到了完美保留,可以实现相位的线性响应
拍频降低频率,可以实现相位差值或频率偏移的精确测量
拍频越低,测量精度越高,但为什么不能太低?
同时由于卫星运动的多普勒效应,在MHz量级,为了拍频不跨越零,
激光功率不稳定性在-5Hz~5Hz内占据主导,因此拍频信号需要避开该频段,即频率下限为5Hz。
下限为6MHz,
考虑到为本身多普勒效应在MHz量级,为保证拍频不跨越零,也需要至少为MHz量级,在5~25MHz之间波动
仪器响应函数
Δ t = \Delta t =
Δ t =
正交性
∫ d k ^ 4 π F + F × = 0 \int \frac{d\hat{k}}{4\pi} F_+F_\times = 0
∫ 4 π d k ^ F + F × = 0
平均响应
∫ d k ^ 4 π F + ≠ ∫ d k ^ 4 π F × ; ∫ d ψ 2 π F + = ∫ d ψ 2 π F × \int \frac{d\hat{k}}{4\pi} F_+ \neq \int \frac{d\hat{k}}{4\pi} F_\times; ~~~~ \int \frac{d\psi}{2\pi} F_+ = \int \frac{d\psi}{2\pi} F_\times
∫ 4 π d k ^ F + = ∫ 4 π d k ^ F × ; ∫ 2 π d ψ F + = ∫ 2 π d ψ F ×
∫ d ψ 2 π ∫ d k ^ 4 π F + = ∫ d ψ 2 π ∫ d k ^ 4 π F × \int \frac{d\psi}{2\pi} \int \frac{d\hat{k}}{4\pi} F_+ = \int \frac{d\psi}{2\pi} \int \frac{d\hat{k}}{4\pi} F_\times
∫ 2 π d ψ ∫ 4 π d k ^ F + = ∫ 2 π d ψ ∫ 4 π d k ^ F ×
对给定的引力波信号h i j h_{ij} h i j ψ \psi ψ
天线模式函数
探测器坐标系、日心坐标系、潮汐效应、相对论效应
探测器对于信号的响应依赖空间方位,被称为天线响应模式(antenna response pattern)或简单的天线模式(antenna pattern),也可称为天线的指向性函数(antenna directivity)或天线波束(antenna beam pattern),后者在射电领域更常见。对于引力波探测而言,天线模式具体依赖天线构型和引力波的方位及偏振。
广义相对论框架下,采用横向无迹(TT)规范,引力波为横波且只有两种偏振模式,在垂直引力波传播平面内
h = ( h + h × h × − h + ) = h + ( 1 0 0 − 1 ) + h × ( 0 1 1 0 ) = h + e + + h × e × \begin{aligned}
\bm{h} = \begin{pmatrix}
h_{+} & h_{\times} \\
h_{\times} & -h_{+}
\end{pmatrix} = h_{+} \begin{pmatrix}
1 & 0 \\
0 & -1
\end{pmatrix} + h_{\times}\begin{pmatrix}
0 & 1\\
1 & 0
\end{pmatrix}
= h_{+} \bm{e}^{+} + h_{\times}\bm{e}^{\times}
\end{aligned} h = ( h + h × h × − h + ) = h + ( 1 0 0 − 1 ) + h × ( 0 1 1 0 ) = h + e + + h × e ×
其中e + , e × \bm{e}^{+}, \bm{e}^{\times} e + , e × h + , h × h_{+}, h_{\times} h + , h ×
e + = u ^ ⊗ u ^ − v ^ ⊗ v ^ e × = u ^ ⊗ v ^ + v ^ ⊗ u ^ e ∘ = u ^ ⊗ u ^ + v ^ ⊗ v ^ e l = k ^ ⊗ k ^ e x = u ^ ⊗ k ^ − k ^ ⊗ u ^ e y = v ^ ⊗ k ^ + k ^ ⊗ v ^ \begin{aligned}
\bm{e}^{+} &= \hat{u} \otimes \hat{u} - \hat{v}\otimes \hat{v}\\
\bm{e}^{\times} &= \hat{u}\otimes \hat{v} + \hat{v}\otimes \hat{u}\\
\bm{e}^{\circ} &= \hat{u} \otimes \hat{u} + \hat{v}\otimes \hat{v}\\
\bm{e}^{l} &= \hat{k}\otimes \hat{k} \\
\bm{e}^{x} &= \hat{u} \otimes \hat{k} - \hat{k}\otimes \hat{u}\\
\bm{e}^{y} &= \hat{v}\otimes \hat{k} + \hat{k}\otimes \hat{v}
\end{aligned} e + e × e ∘ e l e x e y = u ^ ⊗ u ^ − v ^ ⊗ v ^ = u ^ ⊗ v ^ + v ^ ⊗ u ^ = u ^ ⊗ u ^ + v ^ ⊗ v ^ = k ^ ⊗ k ^ = u ^ ⊗ k ^ − k ^ ⊗ u ^ = v ^ ⊗ k ^ + k ^ ⊗ v ^
这里u ^ , v ^ , k ^ \hat{u}, \hat{v}, \hat{k} u ^ , v ^ , k ^ k ^ \hat{k} k ^ u ^ , v ^ \hat{u}, \hat{v} u ^ , v ^ + + + × \times × p ^ , q ^ \hat{p}, \hat{q} p ^ , q ^ u ^ , v ^ \hat{u}, \hat{v} u ^ , v ^ ψ \psi ψ + + + p ^ , q ^ \hat{p}, \hat{q} p ^ , q ^ ψ \psi ψ
h = h ˉ + ϵ + + h ˉ × ϵ × ϵ + = p ^ ⊗ p ^ − q ^ ⊗ q ^ ϵ × = p ^ ⊗ q ^ + q ^ ⊗ p ^ \begin{aligned}
\bm{h} &= \bar{h}_{+} \bm{\epsilon}^{+} + \bar{h}_{\times}\bm{\epsilon}^{\times}\\
\bm{\epsilon}^{+} &= \hat{p}\otimes \hat{p} - \hat{q}\otimes \hat{q}\\
\bm{\epsilon}^{\times} &= \hat{p}\otimes \hat{q} + \hat{q}\otimes \hat{p}
\end{aligned} h ϵ + ϵ × = h ˉ + ϵ + + h ˉ × ϵ × = p ^ ⊗ p ^ − q ^ ⊗ q ^ = p ^ ⊗ q ^ + q ^ ⊗ p ^
( p ^ q ^ ) = R ψ ( u ^ v ^ ) ; R ψ = ( cos ψ − sin ψ sin ψ cos ψ ) \begin{aligned}
\begin{pmatrix}
\hat{p} \\
\hat{q}
\end{pmatrix} =
\mathcal{R}_{\psi}
\begin{pmatrix}
\hat{u} \\
\hat{v}
\end{pmatrix} ; ~~~~~
\mathcal{R}_{\psi} = \begin{pmatrix}
\cos \psi & -\sin \psi \\
\sin \psi & \cos \psi
\end{pmatrix}
\end{aligned} ( p ^ q ^ ) = R ψ ( u ^ v ^ ) ; R ψ = ( cos ψ sin ψ − sin ψ cos ψ )
( p ^ q ^ ) ⊗ ( p ^ q ^ ) = [ R ψ ( u ^ v ^ ) ] ⊗ [ R ψ ( u ^ v ^ ) ] = R ψ [ ( u ^ v ^ ) ⊗ ( u ^ v ^ ) ] R ψ T \begin{aligned}
\begin{pmatrix}
\hat{p} \\
\hat{q}
\end{pmatrix}\otimes
\begin{pmatrix}
\hat{p} \\
\hat{q}
\end{pmatrix} =
\left[\mathcal{R}_{\psi}
\begin{pmatrix}
\hat{u} \\
\hat{v}
\end{pmatrix}\right]
\otimes
\left[\mathcal{R}_{\psi}
\begin{pmatrix}
\hat{u} \\
\hat{v}
\end{pmatrix}\right] =
\mathcal{R}_{\psi}
\left[\begin{pmatrix}
\hat{u} \\
\hat{v}
\end{pmatrix}
\otimes
\begin{pmatrix}
\hat{u} \\
\hat{v}
\end{pmatrix}\right]
\mathcal{R}^T_{\psi}
\end{aligned} ( p ^ q ^ ) ⊗ ( p ^ q ^ ) = [ R ψ ( u ^ v ^ ) ] ⊗ [ R ψ ( u ^ v ^ ) ] = R ψ [ ( u ^ v ^ ) ⊗ ( u ^ v ^ ) ] R ψ T
R ψ ( h + h × h × − h + ) R ψ T = R ψ R ψ ( h + h × h × − h + ) = R 2 ψ ( h + h × h × − h + ) \begin{aligned}
\mathcal{R}_{\psi}
\begin{pmatrix}
h_+ & h_\times\\
h_\times & - h_+
\end{pmatrix}
\mathcal{R}^T_{\psi}
= \mathcal{R}_{\psi}\mathcal{R}_{\psi}
\begin{pmatrix}
h_+ & h_\times\\
h_\times & - h_+
\end{pmatrix}
= \mathcal{R}_{2\psi}
\begin{pmatrix}
h_+ & h_\times\\
h_\times & - h_+
\end{pmatrix}
\end{aligned} R ψ ( h + h × h × − h + ) R ψ T = R ψ R ψ ( h + h × h × − h + ) = R 2 ψ ( h + h × h × − h + )
这个对普通矩阵不成立,是这种特殊情况下的结果?
? ? ( h ˉ + h ˉ × ) = R 2 ψ ( h + h × ) , ( ϵ + ϵ × ) = R 2 ψ ( e + e × ) ? ? ??\begin{aligned}
\begin{pmatrix}
\bar{h}_{+} \\
\bar{h}_{\times}
\end{pmatrix} =
\mathcal{R}_{2\psi}
\begin{pmatrix}
h_{+} \\
h_{\times}
\end{pmatrix}, ~
\begin{pmatrix}
\bm{\epsilon}^{+} \\
\bm{\epsilon}^{\times}
\end{pmatrix} =
\mathcal{R}_{2\psi}
\begin{pmatrix}
\bm{e}^{+} \\
\bm{e}^{\times}
\end{pmatrix}
\end{aligned}?? ? ? ( h ˉ + h ˉ × ) = R 2 ψ ( h + h × ) , ( ϵ + ϵ × ) = R 2 ψ ( e + e × ) ? ?
这里ψ \psi ψ p ^ , q ^ \hat{p}, \hat{q} p ^ , q ^ 2 ψ 2\psi 2 ψ π 4 \frac{\pi}{4} 4 π π 2 \frac{\pi}{2} 2 π
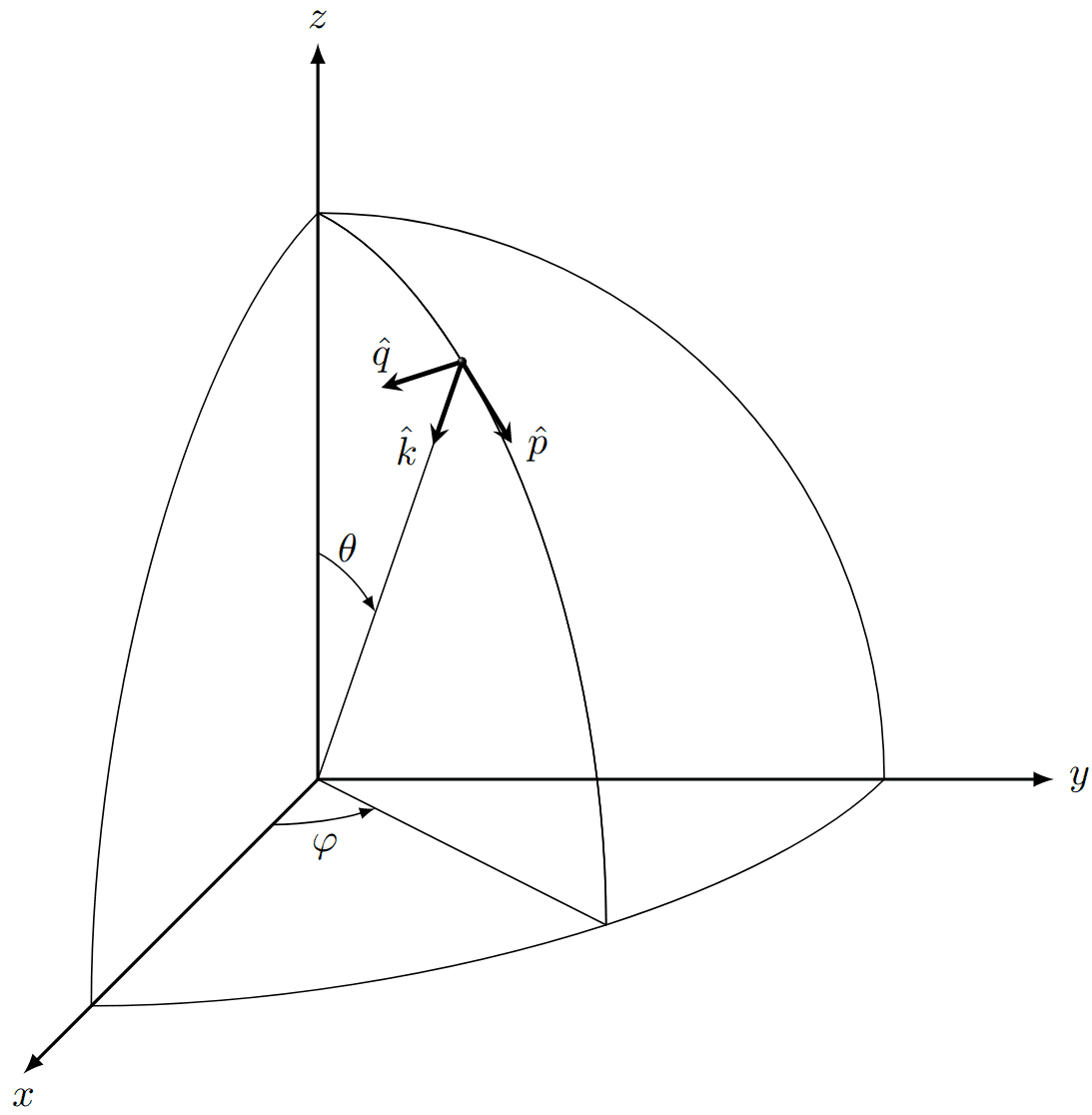
下面讨论探测器对引力波的响应,如下图所示,考虑直角的迈克尔逊干涉仪,沿引力波探测臂建立坐标系,引力波沿k ^ \hat{k} k ^ ( θ , φ ) (\theta, \varphi) ( θ , φ ) x , y x,y x , y θ > π / 2 \theta >\pi/2 θ > π / 2
We denote by θ , φ \theta, \varphi θ , φ k ^ \hat{k} k ^ θ s = π − θ \theta_s = \pi - \theta θ s = π − θ φ s = π + φ \varphi_s = \pi + \varphi φ s = π + φ
首先考虑单臂 情况,探测信号对应应变张量在探测臂方向的投影,对x x x
h x x = 1 2 x ^ ⊗ x ^ : h = 1 2 x ^ ⋅ h ⋅ x ^ \boxed{h_{xx} = \frac{1}{2}~\hat{x}\otimes\hat{x} : \bm{h} = \frac{1}{2}~\hat{x}\cdot \bm{h} \cdot \hat{x}}
h x x = 2 1 x ^ ⊗ x ^ : h = 2 1 x ^ ⋅ h ⋅ x ^
其中x ^ ⊗ x ^ \hat{x}\otimes \hat{x} x ^ ⊗ x ^ x x x
h x x = 1 2 x ^ ⊗ x ^ : ( h ˉ + h ˉ × ) ( ϵ + ϵ × ) = 1 2 ( h ˉ + h ˉ × ) ( x ^ ⋅ ϵ + ⋅ x ^ x ^ ⋅ ϵ × ⋅ x ^ ) \begin{aligned}
h_{xx} = \frac{1}{2}~\hat{x}\otimes\hat{x} : \begin{pmatrix}
\bar{h}_{+} & \bar{h}_{\times}
\end{pmatrix} \begin{pmatrix}
\bm{\epsilon}^{+}\\
\bm{\epsilon}^{\times}
\end{pmatrix}
= \frac{1}{2}\begin{pmatrix}
\bar{h}_{+} & \bar{h}_{\times}
\end{pmatrix}
\begin{pmatrix}
\hat{x}\cdot \bm{\epsilon}^{+} \cdot \hat{x}\\
\hat{x} \cdot \bm{\epsilon}^{\times} \cdot \hat{x}
\end{pmatrix}
\end{aligned} h x x = 2 1 x ^ ⊗ x ^ : ( h ˉ + h ˉ × ) ( ϵ + ϵ × ) = 2 1 ( h ˉ + h ˉ × ) ( x ^ ⋅ ϵ + ⋅ x ^ x ^ ⋅ ϵ × ⋅ x ^ )
同时,探测信号用响应函数表示有:
h = F P h P = ( h + h × ) ( F + F × ) = ( h ˉ + h ˉ × ) ( D + D × ) h = F^P h_P = \begin{pmatrix}
h_{+} & h_{\times}
\end{pmatrix}
\begin{pmatrix}
F^{+} \\ F^{\times}
\end{pmatrix} =
\begin{pmatrix}
\bar{h}_{+} & \bar{h}_{\times}
\end{pmatrix}
\begin{pmatrix}
D^{+} \\ D^{\times}
\end{pmatrix} h = F P h P = ( h + h × ) ( F + F × ) = ( h ˉ + h ˉ × ) ( D + D × )
其中A A A
F x P = x ^ ⋅ e P ⋅ x ^ 2 ; D x P = x ^ ⋅ ϵ P ⋅ x ^ 2 \boxed{ F_{x}^P = \frac{ \hat{x}\cdot \bm{e}^P \cdot \hat{x} }{2};~~~ D_{x}^P = \frac{ \hat{x}\cdot \bm{\epsilon}^P \cdot \hat{x} }{2} }
F x P = 2 x ^ ⋅ e P ⋅ x ^ ; D x P = 2 x ^ ⋅ ϵ P ⋅ x ^
D x + = x ^ ⋅ ϵ + ⋅ x ^ 2 = ( p ^ ⋅ x ^ ) 2 − ( q ^ ⋅ x ^ ) 2 2 D x × = x ^ ⋅ ϵ × ⋅ x ^ 2 = ( p ^ ⋅ x ^ ) ( q ^ ⋅ x ^ ) \begin{aligned}
D_{x}^{+} &= \frac{\hat{x}\cdot \bm{\epsilon}^{+} \cdot \hat{x}}{2} = \frac{(\hat{p}\cdot \hat{x})^2 - (\hat{q}\cdot \hat{x})^2}{2} \\
D_{x}^{\times} &= \frac{\hat{x} \cdot \bm{\epsilon}^{\times} \cdot \hat{x}}{2} = (\hat{p}\cdot \hat{x})(\hat{q}\cdot \hat{x})
\end{aligned} D x + D x × = 2 x ^ ⋅ ϵ + ⋅ x ^ = 2 ( p ^ ⋅ x ^ ) 2 − ( q ^ ⋅ x ^ ) 2 = 2 x ^ ⋅ ϵ × ⋅ x ^ = ( p ^ ⋅ x ^ ) ( q ^ ⋅ x ^ )
根据球坐标系与直角坐标基矢关系 θ ^ ⋅ x ^ = cos θ cos φ , φ ^ ⋅ x ^ = − sin φ \hat{\theta}\cdot\hat{x} = \cos\theta\cos\varphi, ~\hat{\varphi}\cdot\hat{x} = {\footnotesize -}\sin\varphi θ ^ ⋅ x ^ = cos θ cos φ , φ ^ ⋅ x ^ = − sin φ
p ^ ⋅ x ^ = cos θ cos φ , q ^ ⋅ x ^ = sin φ \hat{p}\cdot\hat{x} = \cos\theta\cos\varphi, ~~~ \hat{q}\cdot\hat{x} = \sin\varphi
p ^ ⋅ x ^ = cos θ cos φ , q ^ ⋅ x ^ = sin φ
从而:
D x + ( θ , φ ) = cos 2 θ cos 2 φ − sin 2 φ 2 D x × ( θ , φ ) = cos θ cos φ sin φ \begin{aligned}
D_x^{+}(\theta, \varphi) &= \frac{\cos^2\theta \cos^2\varphi - \sin^2\varphi}{2}\\
D_x^{\times}(\theta, \varphi) &= \cos\theta \cos\varphi \sin\varphi\\
\end{aligned} D x + ( θ , φ ) D x × ( θ , φ ) = 2 cos 2 θ cos 2 φ − sin 2 φ = cos θ cos φ sin φ
指向函数体现了天线对不同方向上信号的相对灵敏度:引力波沿探测臂方向(θ = 1 2 π , φ = 0 , π \theta=\frac{1}{2}\pi, \varphi=0, \pi θ = 2 1 π , φ = 0 , π φ = 1 2 π , 3 2 π \varphi=\frac{1}{2}\pi,\frac{3}{2}\pi φ = 2 1 π , 2 3 π + + + 1 2 \frac{1}{2} 2 1 × \times × θ = 0 , π \theta=0, \pi θ = 0 , π φ \varphi φ φ \varphi φ
类似的,对y y y h y y ( t ) = 1 2 y ^ ⊗ y ^ : h ( t ) h_{yy}(t) = \frac{1}{2}~\hat{y}\otimes\hat{y} : \bm{h}(t) h y y ( t ) = 2 1 y ^ ⊗ y ^ : h ( t )
p ^ ⋅ x ^ = cos θ sin φ ; q ^ ⋅ y ^ = − cos φ \hat{p}\cdot\hat{x} = \cos\theta\sin\varphi ; ~~~ \hat{q}\cdot\hat{y} = -\cos\varphi
p ^ ⋅ x ^ = cos θ sin φ ; q ^ ⋅ y ^ = − cos φ
D y + = y ^ ⋅ ϵ + ⋅ y ^ 2 = ( p ^ ⋅ y ^ ) 2 − ( q ^ ⋅ y ^ ) 2 2 D y × = y ^ ⋅ ϵ × ⋅ y ^ 2 = ( p ^ ⋅ y ^ ) ( q ^ ⋅ y ^ ) \begin{aligned}
D_{y}^{+} &= \frac{\hat{y}\cdot \bm{\epsilon}^{+} \cdot \hat{y}}{2} = \frac{(\hat{p}\cdot \hat{y})^2 - (\hat{q}\cdot \hat{y})^2}{2} \\
D_{y}^{\times} &= \frac{\hat{y} \cdot \bm{\epsilon}^{\times} \cdot \hat{y}}{2} = (\hat{p}\cdot \hat{y})(\hat{q}\cdot \hat{y})
\end{aligned} D y + D y × = 2 y ^ ⋅ ϵ + ⋅ y ^ = 2 ( p ^ ⋅ y ^ ) 2 − ( q ^ ⋅ y ^ ) 2 = 2 y ^ ⋅ ϵ × ⋅ y ^ = ( p ^ ⋅ y ^ ) ( q ^ ⋅ y ^ )
从而:
D y + ( θ , φ ) = cos 2 θ sin 2 φ − cos 2 φ 2 D y × ( θ , φ ) = − cos θ sin φ cos φ \begin{aligned}
D_y^{+}(\theta, \varphi) &= \frac{\cos^2\theta \sin^2\varphi {\footnotesize -} \cos^2\varphi}{2}\\
D_y^{\times}(\theta, \varphi) &= -\cos\theta \sin\varphi \cos\varphi
\end{aligned} D y + ( θ , φ ) D y × ( θ , φ ) = 2 cos 2 θ sin 2 φ − cos 2 φ = − cos θ sin φ cos φ
对于迈克尔逊双臂 干涉,总体响应为两个方向响应之差,即:
D P = 1 2 l ^ 1 ⊗ l ^ 1 : e P − 1 2 l ^ 2 ⊗ l ^ 2 : e P = l ^ 1 ⊗ l ^ 1 − l ^ 2 ⊗ l ^ 2 2 : e P \begin{aligned}
D^P = \frac{1}{2}\hat{l}_1\otimes\hat{l}_1 : \bm{e}^P - \frac{1}{2}\hat{l}_2\otimes\hat{l}_2 : \bm{e}^P = \frac{\hat{l}_1\otimes\hat{l}_1 - \hat{l}_2\otimes\hat{l}_2}{2} : \bm{e}^P
\end{aligned} D P = 2 1 l ^ 1 ⊗ l ^ 1 : e P − 2 1 l ^ 2 ⊗ l ^ 2 : e P = 2 l ^ 1 ⊗ l ^ 1 − l ^ 2 ⊗ l ^ 2 : e P
注意,在这种形式本身不要求干涉臂方向 l ^ 1 , l ^ 2 \hat{l}_1, \hat{l}_2 l ^ 1 , l ^ 2 x ^ , y ^ \hat{x},\hat{y} x ^ , y ^ p ^ , q ^ \hat{p},\hat{q} p ^ , q ^ u ^ , v ^ \hat{u},\hat{v} u ^ , v ^ l ^ 1 , l ^ 2 \hat{l}_1, \hat{l}_2 l ^ 1 , l ^ 2
对于直角的迈克尔逊双臂 干涉而言,总体响应为两者之差:
D P = x ^ ⊗ x ^ − y ^ ⊗ y ^ 2 : e P \begin{aligned}
D^P = \frac{\hat{x}\otimes\hat{x} - \hat{y}\otimes\hat{y}}{2} : \bm{e}^P
\end{aligned} D P = 2 x ^ ⊗ x ^ − y ^ ⊗ y ^ : e P
D + ( θ , φ ) = D x + − D y + = 1 2 ( 1 + cos 2 θ ) cos 2 φ D × ( θ , φ ) = D x × − D y × = cos θ sin 2 φ \begin{aligned}
D^{+}(\theta, \varphi) &= D_x^{+} - D_y^{+} = \frac{1}{2}(1+\cos^2\theta)\cos2\varphi\\
D^{\times}(\theta, \varphi) &= D_x^{\times} - D_y^{\times} = \cos\theta\sin2\varphi
\end{aligned} D + ( θ , φ ) D × ( θ , φ ) = D x + − D y + = 2 1 ( 1 + cos 2 θ ) cos 2 φ = D x × − D y × = cos θ sin 2 φ
D r m s ( θ , φ ) = D + 2 + D × 2 = 1 4 sin 4 θ cos 2 2 φ + cos 2 θ D_{\rm rms}(\theta, \varphi) = \sqrt{ {D^{+}}^2 + {D^{\times}}^2 } = \sqrt{\frac{1}{4}\sin^4\theta\cos^2 2\varphi + \cos^2\theta}
D r m s ( θ , φ ) = D + 2 + D × 2 = 4 1 sin 4 θ cos 2 2 φ + cos 2 θ
对单独的极化模式:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 import numpy as npimport matplotlib.pyplot as pltfrom mpl_toolkits.mplot3d import Axes3Ddef plot_beam_pattern (F, theta, phi, fig, viewangle=( ): r = np.abs (F) x = r * np.sin(theta) * np.cos(phi) y = r * np.sin(theta) * np.sin(phi) z = r * np.cos(theta) ax = fig.add_subplot(111 , projection='3d' ) ax.view_init(10 , 35 ) surf = ax.plot_surface(x, y, z, facecolors=plt.cm.Blues(F)) ax.set_xlabel(r'$x$' ) ax.set_ylabel(r'$y$' ) ax.set_zlabel(r'$z$' ) ax.set_title(r'$F^{+}$' ) mappable = plt.cm.ScalarMappable(cmap='Blues' ) mappable.set_array(F) fig.colorbar(mappable, label='F(theta, phi)' , ax=ax) ax.set_box_aspect([1 , 1 , 1.8 ]) theta_range = np.linspace(0 , np.pi, 100 ) phi_range = np.linspace(0 , 2 *np.pi, 100 ) theta, phi = np.meshgrid(theta_range, phi_range) F = np.sqrt(np.sin(theta)**4 *np.cos(2 *phi)**2 /4 + np.cos(theta)**2 ) fig = plt.figure() plot_beam_pattern(F, theta, phi, fig) plt.show()
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 import numpy as npimport matplotlib.pyplot as pltfrom astropy.coordinates import SkyCoordlon_range = np.linspace(-np.pi, np.pi,360 ) lat_range = np.linspace(-np.pi/2. , np.pi/2. ,180 ) lon, lat = np.meshgrid(lon_range,lat_range) theta, phi = np.meshgrid(theta_range, phi_range) theta = np.pi/2 - lat phi = (lon + 2 *np.pi) % (2 *np.pi) F_plus = (1 +np.cos(theta)**2 )/2 *np.cos(2 *phi) F_cross = np.cos(theta)*np.sin(2 *phi) F = np.sqrt(F_plus**2 + F_cross**2 ) ax = plt.subplot(111 , projection="mollweide" ) c = ax.pcolormesh(lon, lat, F, cmap='Blues' ) plt.colorbar(c, shrink=0.5 ) plt.title(r'Mollweide Projection of $F$' , y=1.1 ) plt.grid(color='white' , linestyle='--' , linewidth=0.5 ) plt.show()
最后,如果考虑到偏振角ψ \psi ψ
( h ˉ + h ˉ × ) ( D + D × ) = ( h + h × ) R 2 ψ ( D + D × ) = ( h + h × ) ( F + F × ) \begin{aligned}
\begin{pmatrix}
\bar{h}_+ & \bar{h}_\times
\end{pmatrix}
\begin{pmatrix}
D^{+}\\
D^{\times}
\end{pmatrix} =
\begin{pmatrix}
h_+ & h_\times
\end{pmatrix}
\mathcal{R}_{2\psi}
\begin{pmatrix}
D^{+}\\
D^{\times}
\end{pmatrix} =
\begin{pmatrix}
h_+ & h_\times
\end{pmatrix}
\begin{pmatrix}
F^{+}\\
F^{\times}
\end{pmatrix}
\end{aligned} ( h ˉ + h ˉ × ) ( D + D × ) = ( h + h × ) R 2 ψ ( D + D × ) = ( h + h × ) ( F + F × )
( F + F × ) = R 2 ψ ( D + D × ) = ( cos 2 ψ − sin 2 ψ sin 2 ψ cos 2 ψ ) ( 1 + cos 2 θ 2 cos 2 φ cos θ sin 2 φ ) \begin{aligned}
\begin{pmatrix}
F^{+}\\
F^{\times}
\end{pmatrix} =
\mathcal{R}_{2\psi}
\begin{pmatrix}
D^{+} \\
D^{\times}
\end{pmatrix} =
\begin{pmatrix}
\cos 2\psi & -\sin 2\psi \\
\sin 2\psi & \cos 2\psi
\end{pmatrix}
\begin{pmatrix}
\frac{1+\cos^2\theta}{2}\cos2\varphi \\
\cos\theta\sin2\varphi
\end{pmatrix}
\end{aligned} ( F + F × ) = R 2 ψ ( D + D × ) = ( cos 2 ψ sin 2 ψ − sin 2 ψ cos 2 ψ ) ( 2 1 + c o s 2 θ cos 2 φ cos θ sin 2 φ )
D + , D × D^+, D^\times D + , D × ψ \psi ψ θ ^ , φ ^ \hat{\theta},\hat{\varphi} θ ^ , φ ^
F r m s ( θ , φ ; ψ ) = F + 2 ( θ , φ ; ψ ) + F × 2 ( θ , φ ; ψ ) = D + 2 ( θ , φ ) + D × 2 ( θ , φ ) F_{\rm rms}(\theta, \varphi; \psi) =\sqrt{ {F^+}^2(\theta, \varphi; \psi) + {F^\times}^2(\theta, \varphi; \psi)} = \sqrt{ {D^+}^2(\theta, \varphi) + {D^\times}^2(\theta, \varphi)}
F r m s ( θ , φ ; ψ ) = F + 2 ( θ , φ ; ψ ) + F × 2 ( θ , φ ; ψ ) = D + 2 ( θ , φ ) + D × 2 ( θ , φ )
均方根响应与偏振无关
F = ∫ d Ω ^ 4 π ∑ P = + , × F P F P = 2 5 F=\int\frac{d\hat{\Omega}}{4\pi} \sum_{P = +, \times} F^P F^P =\frac{2}{5}
F = ∫ 4 π d Ω ^ P = + , × ∑ F P F P = 5 2
F = ∫ d Ω ^ 4 π ∑ P = + , × F P F P = 2 5 sin 2 α F=\int\frac{d\hat{\Omega}}{4\pi} \sum_{P = +, \times} F^P F^P =\frac{2}{5}\sin^2\alpha
F = ∫ 4 π d Ω ^ P = + , × ∑ F P F P = 5 2 sin 2 α
注意这里波源方位θ , ϕ \theta, \phi θ , ϕ ( α , δ ) (\alpha, \delta) ( α , δ ) ( λ , ϕ ) (\lambda,\phi) ( λ , ϕ ) γ \gamma γ
F + ( t , ψ ) = sin ζ [ a ( t ) cos ( 2 ψ ) + b ( t ) sin ( 2 ψ ) ] , F × ( t , ψ ) = sin ζ [ b ( t ) cos ( 2 ψ ) − a ( t ) sin ( 2 ψ ) ] \begin{aligned}
F_+(t,\psi) &= \sin\zeta \left[a(t)\cos(2\psi) + b(t)\sin(2\psi)\right],\\
F_\times(t,\psi) &= \sin\zeta \left[b(t)\cos(2\psi) - a(t)\sin(2\psi)\right]
\end{aligned} F + ( t , ψ ) F × ( t , ψ ) = sin ζ [ a ( t ) cos ( 2 ψ ) + b ( t ) sin ( 2 ψ ) ] , = sin ζ [ b ( t ) cos ( 2 ψ ) − a ( t ) sin ( 2 ψ ) ]
这里 ζ \zeta ζ a ( t ) , b ( t ) a(t), b(t) a ( t ) , b ( t )
a ( t ) = 1 16 sin ( 2 γ ) ( 3 − cos ( 2 λ ) ) ( 3 − cos ( 2 δ ) ) cos [ 2 ( α − ϕ r − Ω r t ) ] − 1 4 cos ( 2 γ ) sin ( λ ) ( 3 − cos ( 2 δ ) ) sin [ 2 ( α − ϕ r − Ω r t ) ] + 1 4 sin ( 2 γ ) sin ( 2 λ ) sin ( 2 δ ) cos [ α − ϕ r − Ω r t ] − 1 2 cos ( 2 γ ) cos ( λ ) sin ( 2 δ ) sin [ α − ϕ r − Ω r t ] + 3 4 sin ( 2 γ ) cos 2 ( λ ) cos 2 ( δ ) , b ( t ) = cos ( 2 γ ) sin ( λ ) sin ( δ ) cos [ 2 ( α − ϕ r − Ω r t ) ] + 1 4 sin ( 2 γ ) ( 3 − cos ( 2 λ ) ) sin ( δ ) sin [ 2 ( α − ϕ r − Ω r t ) ] + cos ( 2 γ ) cos ( λ ) cos ( δ ) cos [ α − ϕ r − Ω r t ] + 1 2 sin ( 2 γ ) sin ( 2 λ ) cos ( δ ) sin [ α − ϕ r − Ω r t ] . \begin{aligned}
a(t) & = {1\over16}\sin(2\gamma)(3-\cos(2\lambda))(3-\cos(2\delta))\cos[2(\alpha-\phi_r-\Omega_r t)]\\
& -{1\over4}\cos(2\gamma)\sin(\lambda)(3-\cos(2\delta))\sin[2(\alpha-\phi_r-\Omega_r t)] \\
& +{1\over4}\sin(2\gamma)\sin(2\lambda)\sin(2\delta)\cos[\alpha-\phi_r-\Omega_r t] \\
& -{1\over2}\cos(2\gamma)\cos(\lambda)\sin(2\delta)\sin[\alpha-\phi_r-\Omega_r t] \\
& +{3\over4}\sin(2\gamma)\cos^2(\lambda)\cos^2(\delta), \\
b(t) & = \cos(2\gamma)\sin(\lambda)\sin(\delta) \cos[2(\alpha-\phi_r-\Omega_r t)] \\
& + {1\over4}\sin(2\gamma)(3-\cos(2\lambda))\sin(\delta)\sin[2(\alpha-\phi_r-\Omega_r t)] \\
& + \cos(2\gamma)\cos(\lambda)\cos(\delta)\cos[\alpha-\phi_r-\Omega_r t] \\
& + {1\over2}\sin(2\gamma)\sin(2\lambda)\cos(\delta)\sin[\alpha-\phi_r-\Omega_r t].
\end{aligned} a ( t ) b ( t ) = 1 6 1 sin ( 2 γ ) ( 3 − cos ( 2 λ ) ) ( 3 − cos ( 2 δ ) ) cos [ 2 ( α − ϕ r − Ω r t ) ] − 4 1 cos ( 2 γ ) sin ( λ ) ( 3 − cos ( 2 δ ) ) sin [ 2 ( α − ϕ r − Ω r t ) ] + 4 1 sin ( 2 γ ) sin ( 2 λ ) sin ( 2 δ ) cos [ α − ϕ r − Ω r t ] − 2 1 cos ( 2 γ ) cos ( λ ) sin ( 2 δ ) sin [ α − ϕ r − Ω r t ] + 4 3 sin ( 2 γ ) cos 2 ( λ ) cos 2 ( δ ) , = cos ( 2 γ ) sin ( λ ) sin ( δ ) cos [ 2 ( α − ϕ r − Ω r t ) ] + 4 1 sin ( 2 γ ) ( 3 − cos ( 2 λ ) ) sin ( δ ) sin [ 2 ( α − ϕ r − Ω r t ) ] + cos ( 2 γ ) cos ( λ ) cos ( δ ) cos [ α − ϕ r − Ω r t ] + 2 1 sin ( 2 γ ) sin ( 2 λ ) cos ( δ ) sin [ α − ϕ r − Ω r t ] .
这里( α , δ ) (\alpha, \delta) ( α , δ ) λ \lambda λ ϕ r \phi_r ϕ r γ \gamma γ Ω r \Omega_r Ω r
地球的自转 v.s. 空间探测的轨道运动(公转自转同步)
二阶张量运算 ⊗ \otimes ⊗ a ⊗ b = a b T \bm{a}\otimes\bm{b} = \bm{a}\bm{b}^T a ⊗ b = a b T
( a ⊗ b ) ⋅ c = ( b ⋅ c ) a ; c ⋅ ( a ⊗ b ) = ( a ⋅ c ) b (\bm{a}\otimes\bm{b})\cdot \bm{c} = (\bm{b} \cdot \bm{c}) \bm{a};~~~\bm{c} \cdot (\bm{a}\otimes\bm{b}) = (\bm{a} \cdot \bm{c}) \bm{b}
( a ⊗ b ) ⋅ c = ( b ⋅ c ) a ; c ⋅ ( a ⊗ b ) = ( a ⋅ c ) b
对于单位矢量e ^ \hat{\bm{e}} e ^ e ^ ⊗ e ^ \hat{\bm{e}} \otimes \hat{\bm{e}} e ^ ⊗ e ^ e ^ \hat{\bm{e}} e ^ : ~:~ :
( a ⊗ b ) : ( c ⊗ d ) = c ⋅ ( a ⊗ b ) ⋅ d = ( a ⋅ c ) ( b ⋅ d ) (\bm{a}\otimes\bm{b}) : (\bm{c}\otimes\bm{d}) = \bm{c} \cdot (\bm{a}\otimes\bm{b}) \cdot \bm{d} = (\bm{a} \cdot \bm{c}) (\bm{b} \cdot \bm{d})
( a ⊗ b ) : ( c ⊗ d ) = c ⋅ ( a ⊗ b ) ⋅ d = ( a ⋅ c ) ( b ⋅ d )
这里张量缩并最终为标量,因此缩并操作对左右两侧的二阶张量是对称的。
平直空间的度规张量为δ i j \delta_{ij} δ i j
R i a = δ j a R i j , R j b = δ i b R i j ? ? ? R_i^{~a} = \delta_{j}^{a} R_{ij}, R_{~j}^{b} = \delta_{i}^{b} R_{ij}???
R i a = δ j a R i j , R j b = δ i b R i j ? ? ?
对应的矩阵表示保持不变。即对于平直空间指标升降并不重要。指标变换(坐标旋转):
e i j = R i a R j b e a b , e i b = R i a e a b ? ? ? e_{ij} = R_i^{~a}R_{~j}^{b} e_{ab}, e_{i}^{~b} = R_i^{~a} e_{ab}???
e i j = R i a R j b e a b , e i b = R i a e a b ? ? ?
对应矩阵e i j = ∑ a ∑ b R i a e a b R b j e_{ij} = \sum_a \sum_b R_{ia} e_{ab} R_{bj} e i j = ∑ a ∑ b R i a e a b R b j ( A B ) i j = ∑ k a i k b k j (\bm{A}\bm{B})_{ij} = \sum_k a_{ik} b_{kj} ( A B ) i j = ∑ k a i k b k j
e ′ = R T e R , R e R T , R e R ? ? ? \bm{e}' = \bm{R}^T \bm{e} \bm{R}, \bm{R} \bm{e} \bm{R}^T, \bm{R} \bm{e} \bm{R}???
e ′ = R T e R , R e R T , R e R ? ? ?
根据矩阵运算规则t r ( A B ) = ∑ i ∑ j a i j b j i {\rm tr}(\bm{A}\bm{B}) = \sum_i \sum_j a_{ij} b_{ji} t r ( A B ) = ∑ i ∑ j a i j b j i
a i j b i j = t r ( A B T ) = t r ( A T B ) = t r ( B T A ) = t r ( B A T ) a^{ij} b_{ij} = {\rm tr}(\bm{A}\bm{B}^T) = {\rm tr}(\bm{A}^T\bm{B}) = {\rm tr}(\bm{B}^T\bm{A}) = {\rm tr}(\bm{B}\bm{A}^T)
a i j b i j = t r ( A B T ) = t r ( A T B ) = t r ( B T A ) = t r ( B A T )
旋转矩阵简介 z − x ′ − z ′ ′ z-x'-z'' z − x ′ − z ′ ′ z z z α \alpha α x x x β \beta β z z z γ \gamma γ
R = R z ( α ) R x ( β ) R z ( γ ) = ( cos α − sin α 0 sin α cos α 0 0 0 1 ) ( 1 0 0 0 cos β − sin β 0 sin β cos β ) ( cos γ − sin γ 0 sin γ cos γ 0 0 0 1 ) \begin{aligned}
\mathcal{R} &= \mathcal{R}_z(\alpha)\mathcal{R}_x(\beta)\mathcal{R}_z(\gamma)\\
&= \begin{pmatrix}
\cos\alpha & -\sin\alpha & 0 \\
\sin\alpha & \cos\alpha & 0 \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
1 & 0 & 0\\
0 & \cos\beta & -\sin\beta \\
0 & \sin\beta & \cos\beta
\end{pmatrix}
\begin{pmatrix}
\cos\gamma & -\sin\gamma & 0 \\
\sin\gamma & \cos\gamma & 0 \\
0 & 0 & 1
\end{pmatrix}
\end{aligned} R = R z ( α ) R x ( β ) R z ( γ ) = ⎝ ⎛ cos α sin α 0 − sin α cos α 0 0 0 1 ⎠ ⎞ ⎝ ⎛ 1 0 0 0 cos β sin β 0 − sin β cos β ⎠ ⎞ ⎝ ⎛ cos γ sin γ 0 − sin γ cos γ 0 0 0 1 ⎠ ⎞
注意,上述矩阵描述的是内禀旋转,即参考系不动,目标对象(逆时针)旋转。对于参考系(逆时针)旋转,则整个过程需要翻转,而正交矩阵的逆就是转置,从而坐标基矢或物体坐标的变换矩阵为:
R = R z T ( γ ) R x T ( β ) R z T ( α ) = ( cos γ sin γ 0 − sin γ cos γ 0 0 0 1 ) ( 1 0 0 0 cos β sin β 0 − sin β cos β ) ( cos α sin α 0 − sin α cos α 0 0 0 1 ) \begin{aligned}
\mathcal{R} &= \mathcal{R}^T_z(\gamma)\mathcal{R}^T_x(\beta)\mathcal{R}^T_z(\alpha)\\
&= \begin{pmatrix}
\cos\gamma & \sin\gamma & 0 \\
-\sin\gamma & \cos\gamma & 0 \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
1 & 0 & 0\\
0 & \cos\beta & \sin\beta \\
0 & -\sin\beta & \cos\beta
\end{pmatrix}
\begin{pmatrix}
\cos\alpha & \sin\alpha & 0 \\
-\sin\alpha & \cos\alpha & 0 \\
0 & 0 & 1
\end{pmatrix}
\end{aligned} R = R z T ( γ ) R x T ( β ) R z T ( α ) = ⎝ ⎛ cos γ − sin γ 0 sin γ cos γ 0 0 0 1 ⎠ ⎞ ⎝ ⎛ 1 0 0 0 cos β − sin β 0 sin β cos β ⎠ ⎞ ⎝ ⎛ cos α − sin α 0 sin α cos α 0 0 0 1 ⎠ ⎞
最后考虑球坐标系,任一点 ( r ^ , θ ^ , φ ^ ) (\hat{r}, \hat{\theta}, \hat{\varphi}) ( r ^ , θ ^ , φ ^ ) z − y ′ z-y' z − y ′
R = P 312 R y T ( θ ) R z T ( φ ) = ( 0 0 1 1 0 0 0 1 0 ) ( cos θ 0 − sin θ 0 1 0 sin θ 0 cos θ ) ( cos φ sin φ 0 − sin φ cos φ 0 0 0 1 ) = ( sin θ cos φ sin θ sin φ cos θ cos θ cos φ cos θ sin φ − sin θ − sin φ cos φ 0 ) \begin{aligned}
\mathcal{R} &= \mathcal{P}_{312} \mathcal{R}^T_y(\theta) \mathcal{R}^T_z(\varphi)\\
&= \begin{pmatrix}
0 & 0 & 1 \\
1 & 0 & 0 \\
0 & 1 & 0
\end{pmatrix}
\begin{pmatrix}
\cos\theta & 0 & -\sin\theta\\
0 & 1 & 0\\
\sin\theta & 0 &\cos\theta \\
\end{pmatrix}
\begin{pmatrix}
\cos\varphi & \sin\varphi & 0 \\
-\sin\varphi & \cos\varphi & 0 \\
0 & 0 & 1
\end{pmatrix}\\
&=\begin{pmatrix}
\sin\theta \cos\varphi & \sin\theta\sin\varphi & \cos\theta \\
\cos\theta\cos\varphi & \cos\theta\sin\varphi & -\sin\theta \\
-\sin\varphi & \cos\varphi & 0\\
\end{pmatrix}
\end{aligned} R = P 3 1 2 R y T ( θ ) R z T ( φ ) = ⎝ ⎛ 0 1 0 0 0 1 1 0 0 ⎠ ⎞ ⎝ ⎛ cos θ 0 sin θ 0 1 0 − sin θ 0 cos θ ⎠ ⎞ ⎝ ⎛ cos φ − sin φ 0 sin φ cos φ 0 0 0 1 ⎠ ⎞ = ⎝ ⎛ sin θ cos φ cos θ cos φ − sin φ sin θ sin φ cos θ sin φ cos φ cos θ − sin θ 0 ⎠ ⎞
( r ^ θ ^ φ ^ ) = R ( x ^ y ^ z ^ ) = ( e ^ i ⋅ e ^ j ) ( x ^ y ^ z ^ ) , i = ( r , θ , φ ) , j = ( x , y , z ) \begin{aligned}
\begin{pmatrix}
\hat{r} \\
\hat{\theta} \\
\hat{\varphi}
\end{pmatrix} =
\mathcal{R}
\begin{pmatrix}
\hat{x} \\
\hat{y} \\
\hat{z}
\end{pmatrix} =
\begin{pmatrix}
& & \\
& \hat{e}_i \cdot \hat{e}_j & \\
& & \\
\end{pmatrix}
\begin{pmatrix}
\hat{x} \\
\hat{y} \\
\hat{z}
\end{pmatrix},~~~\small i=(r, \theta, \varphi), j=(x, y, z)
\end{aligned} ⎝ ⎛ r ^ θ ^ φ ^ ⎠ ⎞ = R ⎝ ⎛ x ^ y ^ z ^ ⎠ ⎞ = ⎝ ⎛ e ^ i ⋅ e ^ j ⎠ ⎞ ⎝ ⎛ x ^ y ^ z ^ ⎠ ⎞ , i = ( r , θ , φ ) , j = ( x , y , z )
( θ ^ ⋅ x ^ θ ^ ⋅ y ^ φ ^ ⋅ x ^ φ ^ ⋅ y ^ ) = ( cos θ cos φ cos θ sin φ − sin φ cos φ ) \begin{pmatrix}
\hat{\theta}\cdot\hat{x} & \hat{\theta}\cdot\hat{y} \\
\hat{\varphi}\cdot\hat{x} & \hat{\varphi}\cdot\hat{y} \\
\end{pmatrix} = \begin{pmatrix}
\cos\theta\cos\varphi & \cos\theta\sin\varphi \\
-\sin\varphi & \cos\varphi
\end{pmatrix} ( θ ^ ⋅ x ^ φ ^ ⋅ x ^ θ ^ ⋅ y ^ φ ^ ⋅ y ^ ) = ( cos θ cos φ − sin φ cos θ sin φ cos φ )
使用通常的张量记号理解这一结果
这里最好用 a , b a, b a , b α , β \alpha, \beta α , β i , j i, j i , j
s ( t ) = D i j h i j ( t ) , D i j = 1 2 ( x ^ i x ^ j − y ^ i y ^ j ) s(t) = D^{ij}h_{ij}(t), ~~~ D^{ij} = \frac{1}{2}(\hat{x}^i \hat{x}^j - \hat{y}^i \hat{y}^j)
s ( t ) = D i j h i j ( t ) , D i j = 2 1 ( x ^ i x ^ j − y ^ i y ^ j )
对应到偏振表示h i j ( t ) = h P ( t ) e i j P = h + e i j + + h × e i j × h_{ij}(t) = h_P(t)e_{ij}^P = h_{+} e^{+}_{ij} + h_{\times} e^{\times}_{ij} h i j ( t ) = h P ( t ) e i j P = h + e i j + + h × e i j ×
s ( t ) = D i j h P ( t ) e i j P = D P h P ( t ) s(t) = D^{ij}h_P(t)e_{ij}^P = D^P h_P(t)
s ( t ) = D i j h P ( t ) e i j P = D P h P ( t )
其中D P ≡ D i j e i j P D^P \equiv D^{ij} e_{ij}^P D P ≡ D i j e i j P A A A
D P = D i j e i j P = D i j R i a R j b e a b P \boxed{D^P = D^{ij} e_{ij}^P = D^{ij} R^{~a}_i R^b_{~j} e_{ab}^P}
D P = D i j e i j P = D i j R i a R j b e a b P
表示为矩阵形式有:
D P = 1 2 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ] \begin{aligned}
D^P &= \frac{1}{2} {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \bm{e}^P ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]
\end{aligned} D P = 2 1 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ]
D P = 1 2 t r [ ( 1 0 0 0 − 1 0 0 0 0 ) R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ] \begin{aligned}
D^P &= \frac{1}{2} {\rm tr}\left[ \begin{pmatrix}
1 & 0 & 0\\
0 & -1 & 0\\
0 & 0 & 0
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \bm{e}^P ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]
\end{aligned} D P = 2 1 t r ⎣ ⎢ ⎡ ⎝ ⎛ 1 0 0 0 − 1 0 0 0 0 ⎠ ⎞ R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ⎦ ⎥ ⎤
e i j P = R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) D P = 1 2 ( x ^ i x ^ j − y ^ i y ^ j ) e i j P = 1 2 ( e 11 P − e 22 P ) \begin{aligned}
e_{ij}^P &= \mathcal{R}_z^T(\varphi) \mathcal{R}_y^T(\theta)~ \bm{e}^P ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi)\\
D^P &= {\small \frac{1}{2}}\left(\hat{x}^i \hat{x}^j - \hat{y}^i \hat{y}^j\right)e^P_{ij} = {\small \frac{1}{2}}\left(e^P_{11} - e^P_{22}\right)
\end{aligned} e i j P D P = R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) = 2 1 ( x ^ i x ^ j − y ^ i y ^ j ) e i j P = 2 1 ( e 1 1 P − e 2 2 P )
( D + D × ) = 1 2 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ] = t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ] \begin{aligned}
\begin{pmatrix}
D^+\\
D^\times
\end{pmatrix} &= \frac{1}{2} {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]\\
&= {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]
\end{aligned} ( D + D × ) = 2 1 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ] = t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ]
( F + F × ) = 1 2 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) R z T ( ψ ) ( e + e × ) R z ( ψ ) R y ( θ ) R z ( φ ) ] = 1 2 R z ( 2 ψ ) t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ] \begin{aligned}
\begin{pmatrix}
F^+\\
F^\times
\end{pmatrix} &= \frac{1}{2} {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)\mathcal{R}^T_z(\psi)~ \begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} ~\mathcal{R}_z(\psi)\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]\\
&= \frac{1}{2} \mathcal{R}_z(2\psi) {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]
\end{aligned} ( F + F × ) = 2 1 t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) R z T ( ψ ) ( e + e × ) R z ( ψ ) R y ( θ ) R z ( φ ) ] = 2 1 R z ( 2 ψ ) t r [ ( 1 0 0 − 1 ) R z T ( φ ) R y T ( θ ) ( e + e × ) R y ( θ ) R z ( φ ) ]
t r [ ( 1 0 0 − 1 ) R z T ( ψ ) ( e + e × ) R z ( ψ ) ] = R z ( 2 ψ ) t r [ ( 1 0 0 − 1 ) ( e + e × ) ] \begin{aligned}
{\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\mathcal{R}^T_z(\psi)~ \begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} ~\mathcal{R}_z(\psi)\right] = \mathcal{R}_z(2\psi) {\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix}
\begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} \right]
\end{aligned} t r [ ( 1 0 0 − 1 ) R z T ( ψ ) ( e + e × ) R z ( ψ ) ] = R z ( 2 ψ ) t r [ ( 1 0 0 − 1 ) ( e + e × ) ]
t r ( R − 1 A R ) = t r ( A ) ; t r [ ( 1 0 0 − 1 ) B ] = B 11 − B 22 {\rm tr}(\mathcal{R}^{-1} A \mathcal{R}) = {\rm tr}(A);~~~
{\rm tr}\left[ \begin{pmatrix}
1 & 0\\
0 & -1
\end{pmatrix} B\right] = B_{11} - B_{22} t r ( R − 1 A R ) = t r ( A ) ; t r [ ( 1 0 0 − 1 ) B ] = B 1 1 − B 2 2
将旋转矩阵对应为复数 (Spinor?) e + ± i e × \bm{e}^+ \pm i \bm{e}^\times e + ± i e ×
e − i ψ ( e + − i e × ) ↔ R z T ( ψ ) ( e + e × ) e^{-i\psi} (\bm{e}^+ - i \bm{e}^\times) \leftrightarrow \mathcal{R}^T_z(\psi)\begin{pmatrix}
\bm{e}^+\\
\bm{e}^\times
\end{pmatrix} e − i ψ ( e + − i e × ) ↔ R z T ( ψ ) ( e + e × )
e i j + = R z T ( φ ) R y T ( θ ) e + R y ( θ ) R z ( φ ) = R z T ( φ ) ( cos 2 θ 0 0 − 1 ) R z ( φ ) = ( cos 2 θ cos 2 φ − sin 2 φ 1 + cos 2 θ 2 sin 2 φ 1 + cos 2 θ 2 sin 2 φ cos 2 θ sin 2 φ − cos 2 φ ) \begin{aligned}
e_{ij}^+ &= \mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \bm{e}^+ ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi)\\
& = \mathcal{R}^T_z(\varphi) \begin{pmatrix}
\cos^2\theta & 0\\
0 & -1
\end{pmatrix} \mathcal{R}_z(\varphi)\\
& = \begin{pmatrix}
\cos^2\theta\cos^2\varphi - \sin^2\varphi & \frac{1+\cos^2\theta}{2} \sin 2\varphi\\
\frac{1+\cos^2\theta}{2} \sin 2\varphi & \cos^2\theta\sin^2\varphi - \cos^2\varphi
\end{pmatrix} \\
\end{aligned} e i j + = R z T ( φ ) R y T ( θ ) e + R y ( θ ) R z ( φ ) = R z T ( φ ) ( cos 2 θ 0 0 − 1 ) R z ( φ ) = ( cos 2 θ cos 2 φ − sin 2 φ 2 1 + c o s 2 θ sin 2 φ 2 1 + c o s 2 θ sin 2 φ cos 2 θ sin 2 φ − cos 2 φ )
e i j × = R z T ( φ ) R y T ( θ ) e × R y ( θ ) R z ( φ ) = R z T ( φ ) ( 0 − cos θ − cos θ 0 ) R z ( φ ) = cos θ × ( sin 2 φ − cos 2 φ − cos 2 φ − sin 2 φ ) \begin{aligned}
e_{ij}^\times &= \mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \bm{e}^\times ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi)\\
& = \mathcal{R}^T_z(\varphi) \begin{pmatrix}
0 & -\cos\theta\\
-\cos\theta & 0
\end{pmatrix} \mathcal{R}_z(\varphi)\\
& = \cos\theta\times\begin{pmatrix}
\sin2\varphi & -\cos2\varphi\\
-\cos2\varphi & -\sin2\varphi
\end{pmatrix}\\
\end{aligned} e i j × = R z T ( φ ) R y T ( θ ) e × R y ( θ ) R z ( φ ) = R z T ( φ ) ( 0 − cos θ − cos θ 0 ) R z ( φ ) = cos θ × ( sin 2 φ − cos 2 φ − cos 2 φ − sin 2 φ )
D P = 1 2 t r [ ( 0 sin Υ sin Υ 0 ) R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ] \begin{aligned}
D^P &= \frac{1}{2} {\rm tr}\left[ \begin{pmatrix}
0 & \sin\Upsilon\\
\sin\Upsilon & 0
\end{pmatrix}
\mathcal{R}^T_z(\varphi) \mathcal{R}^T_y(\theta)~ \bm{e}^P ~\mathcal{R}_y(\theta)\mathcal{R}_z(\varphi) \right]
\end{aligned} D P = 2 1 t r [ ( 0 sin Υ sin Υ 0 ) R z T ( φ ) R y T ( θ ) e P R y ( θ ) R z ( φ ) ]
( D + D × ) = sin Υ × [ 1 + cos 2 θ 2 sin ( 2 φ ) − cos θ cos ( 2 φ ) ] \begin{aligned}
\begin{pmatrix}
D^{+}\\
D^{\times}
\end{pmatrix} = \sin\Upsilon\times
\begin{bmatrix}
\frac{1+\cos^2\theta}{2}\sin(2\varphi) \\
-\cos\theta\cos(2\varphi)
\end{bmatrix}
\end{aligned} ( D + D × ) = sin Υ × [ 2 1 + c o s 2 θ sin ( 2 φ ) − cos θ cos ( 2 φ ) ]
当Υ = π 2 \Upsilon=\frac{\pi}{2} Υ = 2 π φ = φ ′ + π 4 \varphi = \varphi'+\frac{\pi}{4} φ = φ ′ + 4 π
对于一般地任意夹角的干涉臂:
( D + D × ) = sin Υ × [ 1 + cos 2 θ 2 sin ( 2 φ + Υ ) cos θ cos ( 2 φ + Υ ) ] \begin{aligned}
\begin{pmatrix}
D^{+}\\
D^{\times}
\end{pmatrix} = \sin\Upsilon\times
\begin{bmatrix}
\frac{1+\cos^2\theta}{2}\sin(2\varphi+\Upsilon) \\
\cos\theta\cos(2\varphi+\Upsilon)
\end{bmatrix}
\end{aligned} ( D + D × ) = sin Υ × [ 2 1 + c o s 2 θ sin ( 2 φ + Υ ) cos θ cos ( 2 φ + Υ ) ]
当Υ = π 2 \Upsilon=\frac{\pi}{2} Υ = 2 π Υ = 0 \Upsilon=0 Υ = 0
( D + D × ) = sin Υ × [ 1 + cos 2 θ 2 sin ( 2 φ − 2 β + Υ ) cos θ cos ( 2 φ − 2 β + Υ ) ] \begin{aligned}
\begin{pmatrix}
D^{+}\\
D^{\times}
\end{pmatrix} = \sin\Upsilon\times
\begin{bmatrix}
\frac{1+\cos^2\theta}{2}\sin(2\varphi-2\beta+\Upsilon) \\
\cos\theta\cos(2\varphi-2\beta+\Upsilon)
\end{bmatrix}
\end{aligned} ( D + D × ) = sin Υ × [ 2 1 + c o s 2 θ sin ( 2 φ − 2 β + Υ ) cos θ cos ( 2 φ − 2 β + Υ ) ]
如果进一步考虑到引力波的偏振有F P = R z ( 2 ψ ) D P F^P = \mathcal{R}_z(2\psi)D^P F P = R z ( 2 ψ ) D P
e i j + = x ^ i x ^ j − y ^ i y ^ j , e a b + = u ^ a u ^ b − v ^ a v ^ b e^{+}_{ij} = \hat{x}_i\hat{x}_j - \hat{y}_i\hat{y}_j, ~~~ e^{+}_{ab} = \hat{u}_a\hat{u}_b - \hat{v}_a\hat{v}_b
e i j + = x ^ i x ^ j − y ^ i y ^ j , e a b + = u ^ a u ^ b − v ^ a v ^ b
R i a = x ^ i u ^ a ; R j b = y j v b ? ? ? R^{~a}_{i} = \hat{x}_i \hat{u}^a; R^b_{~j} = y_j v^b ???
R i a = x ^ i u ^ a ; R j b = y j v b ? ? ?
( p ^ q ^ ) = R y ( θ ) R z ( φ ) ( x ^ y ^ ) , ( u ^ v ^ ) = R y ( θ ) R z ( φ ) R z ( ψ ) ( x ^ y ^ ) \begin{aligned}
\begin{pmatrix}
\hat{p}\\
\hat{q}
\end{pmatrix}= \mathcal{R}_y(\theta)\mathcal{R}_z(\varphi)
\begin{pmatrix}
\hat{x}\\
\hat{y}
\end{pmatrix}, ~~~
\begin{pmatrix}
\hat{u}\\
\hat{v}
\end{pmatrix}= \mathcal{R}_y(\theta)\mathcal{R}_z(\varphi)\mathcal{R}_z(\psi)
\begin{pmatrix}
\hat{x}\\
\hat{y}
\end{pmatrix}
\end{aligned} ( p ^ q ^ ) = R y ( θ ) R z ( φ ) ( x ^ y ^ ) , ( u ^ v ^ ) = R y ( θ ) R z ( φ ) R z ( ψ ) ( x ^ y ^ )
R y ( θ ) = ( cos θ 0 0 − 1 ) , R z ( φ ) ( cos φ sin φ − sin φ cos φ ) , R z ( ψ ) ( cos ψ sin ψ − sin ψ cos ψ ) \begin{aligned}
\mathcal{R}_y(\theta) = \begin{pmatrix}
\cos\theta & 0 \\
0 & -1
\end{pmatrix}, ~~
\mathcal{R}_z(\varphi)
\begin{pmatrix}
\cos\varphi & \sin\varphi \\
-\sin\varphi & \cos\varphi
\end{pmatrix}, ~~
\mathcal{R}_z(\psi)
\begin{pmatrix}
\cos\psi & \sin\psi \\
-\sin\psi & \cos\psi
\end{pmatrix}
\end{aligned} R y ( θ ) = ( cos θ 0 0 − 1 ) , R z ( φ ) ( cos φ − sin φ sin φ cos φ ) , R z ( ψ ) ( cos ψ − sin ψ sin ψ cos ψ )
下面以双星绕转的单频信号为例分析引力波的响应。一般信号可通过傅里叶变换得到频域分量。
h + ( t ) = h 0 1 + cos 2 ι 2 cos ( 2 π f t ) h × ( t ) = h 0 cos ι sin ( 2 π f t ) h 0 = 4 d L ( G M c c 2 ) 5 / 3 ( π f c ) 2 / 3 \begin{aligned}
h_+(t) &= h_0 \frac{1+\cos^2\iota}{2} \cos(2\pi f t)\\
h_\times(t) &= h_0 \cos\iota \sin(2\pi f t)\\
h_0 & = \frac{4}{d_L}\left(\frac{G \mathcal{M}_c}{c^2}\right)^{5/3}\left(\frac{\pi f}{c}\right)^{2/3}
\end{aligned} h + ( t ) h × ( t ) h 0 = h 0 2 1 + cos 2 ι cos ( 2 π f t ) = h 0 cos ι sin ( 2 π f t ) = d L 4 ( c 2 G M c ) 5 / 3 ( c π f ) 2 / 3
s ( t ) = F P h P ( t ) = h 0 ( t ) [ F + 1 + cos 2 ι 2 cos ( 2 π f t ) + F × cos ι sin ( 2 π f t ) ] s(t) = F^P h_P(t) = h_0(t) \left[F^+\frac{1+\cos^2\iota}{2} \cos(2\pi f t) + F^\times\cos\iota \sin(2\pi f t)\right]
s ( t ) = F P h P ( t ) = h 0 ( t ) [ F + 2 1 + cos 2 ι cos ( 2 π f t ) + F × cos ι sin ( 2 π f t ) ]
引入偏振调制角 ϕ p ≡ arctan 2 cos ι F × ( θ , φ , ψ ) ( 1 + cos 2 ι ) F + ( θ , φ , ψ ) \phi_p \equiv \arctan\frac{2 \cos\iota ~ F^\times(\theta, \varphi, \psi)}{(1+\cos^2\iota)~F^+(\theta, \varphi, \psi)} ϕ p ≡ arctan ( 1 + c o s 2 ι ) F + ( θ , φ , ψ ) 2 c o s ι F × ( θ , φ , ψ )
s ( t ) = h 0 ( t ) F r m s ( θ , φ ; ψ , ι ) cos ( 2 π f t − ϕ p ) \begin{aligned}
s(t) = h_0(t) F_{\rm rms}(\theta, \varphi; \psi, \iota) \cos(2\pi f t - \phi_p)\\
\end{aligned} s ( t ) = h 0 ( t ) F r m s ( θ , φ ; ψ , ι ) cos ( 2 π f t − ϕ p )
其中 F r m s ( θ , φ ; ψ , ι ) F_{\rm rms}(\theta, \varphi; \psi, \iota) F r m s ( θ , φ ; ψ , ι )
F r m s ( θ , φ ; ψ , ι ) ≡ ( 1 + cos 2 ι 2 ) 2 F + 2 ( θ , φ , ψ ) + cos 2 ι F × 2 ( θ , φ , ψ ) F_{\rm rms}(\theta, \varphi; \psi, \iota) \equiv \sqrt{\left(\frac{1+\cos^2\iota}{2}\right)^2 {F^+}^2(\theta, \varphi, \psi) + \cos^2\iota ~ {F^\times}^2(\theta, \varphi, \psi)}
F r m s ( θ , φ ; ψ , ι ) ≡ ( 2 1 + cos 2 ι ) 2 F + 2 ( θ , φ , ψ ) + cos 2 ι F × 2 ( θ , φ , ψ )
当视线方向与双星轨道平面垂直,ι = 0 , π \iota=0, \pi ι = 0 , π
F r m s ( θ , φ ; ψ , 0 ) = F + 2 ( θ , φ ; ψ ) + F × 2 ( θ , φ ; ψ ) = D + 2 ( θ , φ ) + D × 2 ( θ , φ ) F_{\rm rms}(\theta, \varphi; \psi, 0) =\sqrt{ {F^+}^2(\theta, \varphi; \psi) + {F^\times}^2(\theta, \varphi; \psi)} = \sqrt{ {D^+}^2(\theta, \varphi) + {D^\times}^2(\theta, \varphi)}
F r m s ( θ , φ ; ψ , 0 ) = F + 2 ( θ , φ ; ψ ) + F × 2 ( θ , φ ; ψ ) = D + 2 ( θ , φ ) + D × 2 ( θ , φ )
与偏振角无关,此时偏振效应全部体现于相位调制角ϕ p = arctan F × ( θ , φ ; ψ ) F + ( θ , φ ; ψ ) \phi_p=\arctan\frac{F^\times(\theta, \varphi; \psi)}{F^+(\theta, \varphi; \psi)} ϕ p = arctan F + ( θ , φ ; ψ ) F × ( θ , φ ; ψ )
对于任意的轨道倾角ι \iota ι ⟨ F r m s ( θ , φ , ψ ; ι ) ⟩ ι = 4 5 ? ? ? F r m s ( θ , φ ; ψ , 0 ) \langle F_{\rm rms}(\theta, \varphi, \psi; \iota) \rangle_\iota = \sqrt{\frac{4}{5}}??? F_{\rm rms}(\theta, \varphi; \psi, 0) ⟨ F r m s ( θ , φ , ψ ; ι ) ⟩ ι = 5 4 ? ? ? F r m s ( θ , φ ; ψ , 0 )
如果用复数形式表示,更为简明:
s ( t ) = F + h + ( t ) + F × h × ( t ) = ℜ [ ( F + + i F × ) ( h + − i h × ) ] = ℜ [ ( F + 1 + cos 2 ι 2 + i F × cos ι ) h 0 ( t ) e − i 2 π f t ] = ℜ [ Q ( θ , φ , ψ ; ι ) h 0 ( t ) e − i 2 π f t ] Q ( θ , φ ; ψ , ι ) ≡ 1 + cos 2 ι 2 F + ( θ , φ , ψ ) + i cos ι F × ( θ , φ , ψ ) = ∣ Q ∣ e − i ϕ p \begin{aligned}
s(t) &= F^+ h_+(t) + F^{\times} h_{\times}(t) = \Re \left[\left(F^+ + iF^{\times}\right)\left(h_+ - ih_{\times}\right)\right]\\
&= \Re \left[\left(F^+\frac{1+\cos^2\iota}{2} + i F^\times\cos\iota \right) h_0(t)e^{-i2\pi f t}\right]\\
&= \Re \left[Q(\theta, \varphi, \psi; \iota) ~ h_0(t)e^{-i2\pi f t}\right]\\
Q(\theta, & \varphi; \psi, \iota) \equiv \frac{1+\cos^2\iota}{2} F^+(\theta, \varphi, \psi) + i \cos\iota ~ F^\times(\theta, \varphi, \psi) = |Q|e^{-i\phi_p}
\end{aligned} s ( t ) Q ( θ , = F + h + ( t ) + F × h × ( t ) = ℜ [ ( F + + i F × ) ( h + − i h × ) ] = ℜ [ ( F + 2 1 + cos 2 ι + i F × cos ι ) h 0 ( t ) e − i 2 π f t ] = ℜ [ Q ( θ , φ , ψ ; ι ) h 0 ( t ) e − i 2 π f t ] φ ; ψ , ι ) ≡ 2 1 + cos 2 ι F + ( θ , φ , ψ ) + i cos ι F × ( θ , φ , ψ ) = ∣ Q ∣ e − i ϕ p
这里Q Q Q F r m s F_{\rm rms} F r m s
书上推的是 e i Φ ( f ) , Φ × ( f ) = Φ + ( f ) + π / 2 e^{i\Phi(f)}, \Phi_{\times}(f) = \Phi_{+}(f) +\pi/2 e i Φ ( f ) , Φ × ( f ) = Φ + ( f ) + π / 2 e − i Φ ( f ) , Φ × ( f ) = Φ + ( f ) − π / 2 e^{-i\Phi(f)}, \Phi_{\times}(f) = \Phi_{+}(f) -\pi/2 e − i Φ ( f ) , Φ × ( f ) = Φ + ( f ) − π / 2
s ~ ( f ) = F P h ~ P ( f ) = h ~ 0 ( f ) [ F + 1 + cos 2 ι 2 e − i Ψ ( f ) + F × cos ι e − i [ Ψ ( f ) − π 2 ] ] = h ~ 0 ( f ) ( F + 1 + cos 2 ι 2 + i F × cos ι ) e − i Ψ ( f ) = h ~ 0 ( f ) Q ( θ , φ , ψ ; ι ) e − i Ψ ( f ) \begin{aligned}
\tilde{s}(f) &= F^P \tilde{h}_P(f) = \tilde{h}_0(f) \left[F^+\frac{1+\cos^2\iota}{2} e^{-i\Psi(f)} + F^\times\cos\iota~ e^{-i[\Psi(f) -\frac{\pi}{2}]} \right]\\
&= \tilde{h}_0(f) \left(F^+\frac{1+\cos^2\iota}{2} + i F^\times\cos\iota \right) e^{-i\Psi(f)} = \tilde{h}_0(f) ~ Q(\theta, \varphi, \psi; \iota) ~ e^{-i\Psi(f)}\\
\end{aligned} s ~ ( f ) = F P h ~ P ( f ) = h ~ 0 ( f ) [ F + 2 1 + cos 2 ι e − i Ψ ( f ) + F × cos ι e − i [ Ψ ( f ) − 2 π ] ] = h ~ 0 ( f ) ( F + 2 1 + cos 2 ι + i F × cos ι ) e − i Ψ ( f ) = h ~ 0 ( f ) Q ( θ , φ , ψ ; ι ) e − i Ψ ( f )
系统传递函数
前面的推导仅涉及引力波信号作为张量在测量方向的投影,而未考虑随时间的变化。具体地,对。引力波作为在空间中以光速传播的张量信号,对其进行完整描述涉及:
信号频率分解:h ( t ) = ∫ h ~ ( f ) e i 2 π f t d f \displaystyle h(t) = \int \tilde{h}(f) e^{i2\pi f t} df h ( t ) = ∫ h ~ ( f ) e i 2 π f t d f
信号传播时延:h ( t , r ⃗ ) = h r ⃗ = 0 ( t − k ^ ⋅ r ⃗ c ) h(t, \vec{r}) = h_{\vec{r}=0}(t-\hat{k}\cdot\frac{\vec{r}}{c}) h ( t , r ) = h r = 0 ( t − k ^ ⋅ c r )
取空间任意位置作为参考点(坐标原点),r ⃗ \vec{r} r
h i j T T ( t , r ⃗ ) = h ˉ i j T T ( t − k ^ ⋅ r ⃗ c ) = ∫ h ~ i j T T ( f ) e i 2 π f ( t − k ^ ⋅ r ⃗ c ) d f h^{TT}_{ij} (t, \vec{r}) = \bar{h}^{TT}_{ij}\left(t-\hat{k}\cdot{\textstyle\frac{\vec{r}}{c}}\right) = \int\tilde{h}^{TT}_{ij}(f) e^{i 2\pi f (t-\hat{k}\cdot\frac{\vec{r}}{c})} df
h i j T T ( t , r ) = h ˉ i j T T ( t − k ^ ⋅ c r ) = ∫ h ~ i j T T ( f ) e i 2 π f ( t − k ^ ⋅ c r ) d f
这里 h ˉ i j \bar{h}_{ij} h ˉ i j r ⃗ = 0 \vec{r}=0 r = 0 h ~ i j ( f ) \tilde{h}_{ij}(f) h ~ i j ( f ) h ~ ( f ) = ∣ h ~ ( f ) ∣ e i ϕ 0 \tilde{h}(f) = \left|\tilde{h}(f)\right|e^{i\phi_0} h ~ ( f ) = ∣ ∣ ∣ ∣ h ~ ( f ) ∣ ∣ ∣ ∣ e i ϕ 0
e i 2 π f ( t − k ^ ⋅ r ⃗ c ) v . s . e − i 2 π f ( t − k ^ ⋅ r ⃗ c ) e^{i 2\pi f (t-\hat{k}\cdot\frac{\vec{r}}{c})} ~~~~~ {\rm v.s.} ~~~~~~ e^{-i 2\pi f (t-\hat{k}\cdot\frac{\vec{r}}{c})}
e i 2 π f ( t − k ^ ⋅ c r ) v . s . e − i 2 π f ( t − k ^ ⋅ c r )
下面考虑激光沿干涉臂传播过程中受到的影响,为便于推导这里先关注单个频率成分:
Δ t = 1 2 c ∫ s = 0 L h ( s ) d s = 1 2 c ∫ s = 0 L x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ r ⃗ c ) d s \Delta t = \frac{1}{2c}\int_{s=0}^{L} h(s) d s= \frac{1}{2c}\int_{s=0}^{L} \hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t-\hat{k}\cdot\frac{\vec{r}}{c})} ds
Δ t = 2 c 1 ∫ s = 0 L h ( s ) d s = 2 c 1 ∫ s = 0 L x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ c r ) d s
其中,r ⃗ \vec{r} r t t t s s s
t ( s ) = t ∣ r ⃗ 1 + s / c = t ∣ r ⃗ 2 − L / c + s / c ; r ⃗ ( s ) = r ⃗ 1 + s x ^ = r ⃗ 2 − L x ^ + s x ^ t(s) = t|_{\vec{r}_1} + s/c = t|_{\vec{r}_2} - L/c + s/c; ~~~ \vec{r}(s) = \vec{r}_1 + s\hat{x} = \vec{r}_2 - L\hat{x} + s\hat{x}
t ( s ) = t ∣ r 1 + s / c = t ∣ r 2 − L / c + s / c ; r ( s ) = r 1 + s x ^ = r 2 − L x ^ + s x ^
这里r 1 ⃗ , r 2 ⃗ \vec{r_1}, \vec{r_2} r 1 , r 2 x ^ \hat{x} x ^ t ∣ r ⃗ 1 , t ∣ r ⃗ 2 t|_{\vec{r}_1}, t|_{\vec{r}_2} t ∣ r 1 , t ∣ r 2 x ^ \hat{x} x ^ k ^ \hat{k} k ^ x ^ \hat{x} x ^
Δ t = 1 2 c x ^ i x ^ j h ~ i j ( f ) ∫ s = 0 L e i ω ( t ∣ r ⃗ 1 + s c − k ^ ⋅ r ⃗ 1 c − k ^ ⋅ x ^ s c ) d s = 1 2 c x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) ∫ s = 0 L e i ω ( 1 − k ^ ⋅ x ^ ) s c d s = 1 2 c x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) c i ω ( 1 − k ^ ⋅ x ^ ) e i ω ( 1 − k ^ ⋅ x ^ ) s c ∣ 0 L = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) e i ω ( 1 − k ^ ⋅ x ^ ) 2 L c 2 sin [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] ω ( 1 − k ^ ⋅ x ^ ) = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) e i ω ( 1 − k ^ ⋅ x ^ ) L 2 c L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 + L 2 c − k ^ ⋅ r ⃗ 1 + L x ^ / 2 c ) L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] \begin{aligned}
\Delta t &= \frac{1}{2c}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) \int_{s=0}^{L} e^{i\omega (t|_{\vec{r}_1} + \frac{s}{c} - \hat{k}\cdot\frac{\vec{r}_1}{c} - \hat{k}\cdot\hat{x}\frac{s}{c})} ds\\
&= \frac{1}{2c}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \int_{s=0}^{L} e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{s}{c}} ds\\
&= \frac{1}{2c}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} {\small \frac{c}{i\omega (1 - \hat{k}\cdot\hat{x})} } e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{s}{c}}\Big|_0^L\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{2L}{c}} ~ \small \frac{2\sin\left[\omega(1-\hat{k} \cdot \hat{x}) \frac{L}{2c}\right] }{\omega(1-\hat{k} \cdot \hat{x})}\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} e^{i\omega (1-\hat{k} \cdot \hat{x}) \frac{L}{2c}} ~{\small \frac{L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} + \frac{L}{2c} - \hat{k}\cdot\frac{\vec{r}_1+ L\hat{x}/2}{c})} ~{\small \frac{L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\end{aligned} Δ t = 2 c 1 x ^ i x ^ j h ~ i j ( f ) ∫ s = 0 L e i ω ( t ∣ r 1 + c s − k ^ ⋅ c r 1 − k ^ ⋅ x ^ c s ) d s = 2 c 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) ∫ s = 0 L e i ω ( 1 − k ^ ⋅ x ^ ) c s d s = 2 c 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) i ω ( 1 − k ^ ⋅ x ^ ) c e i ω ( 1 − k ^ ⋅ x ^ ) c s ∣ ∣ ∣ ∣ 0 L = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) e i ω ( 1 − k ^ ⋅ x ^ ) c 2 L ω ( 1 − k ^ ⋅ x ^ ) 2 sin [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) e i ω ( 1 − k ^ ⋅ x ^ ) 2 c L c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 + 2 c L − k ^ ⋅ c r 1 + L x ^ / 2 ) c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ]
这里的sinc可以通过窗函数积分直接看出来吗1 2 δ ∫ − δ δ e − i x d x = s i n c δ \frac{1}{2\delta}\int_{-\delta}^{\delta} e^{-ix} dx= {\rm sinc} \delta 2 δ 1 ∫ − δ δ e − i x d x = s i n c δ
这里t ∣ r ⃗ 1 + L 2 c t|_{\vec{r}_1} + \frac{L}{2c} t ∣ r 1 + 2 c L r ⃗ 1 + L x ^ / 2 \vec{r}_1+ L\hat{x}/2 r 1 + L x ^ / 2 s i n c {\rm sinc} s i n c s i n c {\rm sinc} s i n c r e c t \rm rect r e c t
Δ t ( t ∣ r ⃗ 1 ) = 1 2 x ^ i x ^ j h i j ( t ∣ r ⃗ 1 + L 2 c , r ⃗ 1 + L x ^ 2 ) ∗ L c r e c t [ 1 ( 1 − k ^ ⋅ x ^ ) L c t ∣ r ⃗ 1 ] ( 1 − k ^ ⋅ x ^ ) L c = 1 2 x ^ i x ^ j 1 − k ^ ⋅ x ^ h i j ( t ∣ r ⃗ 1 + L 2 c , r ⃗ 1 + L x ^ 2 ) ∗ r e c t ( c t ∣ r ⃗ 1 / L 1 − k ^ ⋅ x ^ ) \begin{aligned}
\Delta t (t|_{\vec{r}_1}) &= \frac{1}{2}\hat{x}^i\hat{x}^j h_{ij}(t|_{\vec{r}_1} + {\textstyle \frac{L}{2c}}, \vec{r}_1+ {\textstyle \frac{L\hat{x}}{2}}) * \frac{L}{c} \frac{ {\rm rect}\left[ \frac{1}{(1-\hat{k}\cdot\hat{x})\frac{L}{c}} t|_{\vec{r}_1} \right] }{(1-\hat{k}\cdot\hat{x})\frac{L}{c}}\\
&= \frac{1}{2} \frac{ \hat{x}^i\hat{x}^j }{1-\hat{k}\cdot\hat{x}} h_{ij}(t|_{\vec{r}_1} + {\textstyle \frac{L}{2c}}, \vec{r}_1+ {\textstyle \frac{L\hat{x}}{2}}) * {\rm rect}\small \left(\frac{ct|_{\vec{r}_1}/L}{1-\hat{k}\cdot\hat{x}}\right)
\end{aligned} Δ t ( t ∣ r 1 ) = 2 1 x ^ i x ^ j h i j ( t ∣ r 1 + 2 c L , r 1 + 2 L x ^ ) ∗ c L ( 1 − k ^ ⋅ x ^ ) c L r e c t [ ( 1 − k ^ ⋅ x ^ ) c L 1 t ∣ r 1 ] = 2 1 1 − k ^ ⋅ x ^ x ^ i x ^ j h i j ( t ∣ r 1 + 2 c L , r 1 + 2 L x ^ ) ∗ r e c t ( 1 − k ^ ⋅ x ^ c t ∣ r 1 / L )
引力波信号与矩形窗卷积,相当于信号的滑动平均,窗口宽度为( 1 − k ^ ⋅ x ^ ) L c (1-\hat{k}\cdot\hat{x})\frac{L}{c} ( 1 − k ^ ⋅ x ^ ) c L
代入t ∣ r ⃗ 1 = t ∣ r ⃗ 2 − L c , r ⃗ 1 = r ⃗ 2 − L x ^ t|_{\vec{r}_1} = t|_{\vec{r}_2} - \frac{L}{c}, \vec{r}_1 = \vec{r}_2 - L\hat{x} t ∣ r 1 = t ∣ r 2 − c L , r 1 = r 2 − L x ^
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − L c − k ^ ⋅ r ⃗ 2 c + k ^ ⋅ x ^ L c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ 1 − e − i ω ( 1 − k ^ ⋅ x ^ ) L c ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) e − i ω ( 1 − k ^ ⋅ x ^ ) L 2 c L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − L 2 c − k ^ ⋅ r ⃗ 2 − L x ^ / 2 c ) L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \frac{L}{c} - \hat{k}\cdot\frac{\vec{r}_2}{c} + \hat{k}\cdot\hat{x}\frac{L}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[1 - e^{-i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} e^{-i\omega (1- \hat{k} \cdot \hat{x}) \frac{L}{2c} } ~ {\small \frac{L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \frac{L}{2c} - \hat{k}\cdot\frac{\vec{r}_2-L\hat{x}/2}{c})} ~ {\small \frac{L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]
\end{aligned} Δ t = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − c L − k ^ ⋅ c r 2 + k ^ ⋅ x ^ c L ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ 1 − e − i ω ( 1 − k ^ ⋅ x ^ ) c L ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) e − i ω ( 1 − k ^ ⋅ x ^ ) 2 c L c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − 2 c L − k ^ ⋅ c r 2 − L x ^ / 2 ) c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ]
除了时间(相位)变化,对引力波效应的另一个常用描述是分数多普勒频移Δ ν ν = ν r e c v − ν e m i t ν e m i t \frac{\Delta \nu}{\nu} = \frac{\nu_{\rm recv} - \nu_{\rm emit}}{\nu_{\rm emit}} ν Δ ν = ν e m i t ν r e c v − ν e m i t z z z y y y
ϕ r e c v = ϕ e m i t + 2 π ν e m i t L c + 2 π ν e m i t Δ t \phi_{\rm recv} = \phi_{\rm emit} + 2 \pi \nu_{\rm emit}\frac{L}{c} + 2 \pi \nu_{\rm emit}\Delta t
ϕ r e c v = ϕ e m i t + 2 π ν e m i t c L + 2 π ν e m i t Δ t
求导可得Δ ν ν = Δ t ˙ = i ω Δ t \frac{\Delta \nu}{\nu} = \dot{\Delta t} = i\omega \Delta t ν Δ ν = Δ t ˙ = i ω Δ t
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 + L 2 c − k ^ ⋅ r ⃗ 1 + L x ^ / 2 c ) L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] Δ ν ν = i 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 + L 2 c − k ^ ⋅ r ⃗ 1 + L x ^ / 2 c ) ω L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} + \frac{L}{2c} - \hat{k}\cdot\frac{\vec{r}_1+ L\hat{x}/2}{c})} ~{\small \frac{L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\frac{\Delta \nu}{\nu} &= \frac{i}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} + \frac{L}{2c} - \hat{k}\cdot\frac{\vec{r}_1+ L\hat{x}/2}{c})} ~{\small \frac{\omega L}{c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]
\end{aligned} Δ t ν Δ ν = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 + 2 c L − k ^ ⋅ c r 1 + L x ^ / 2 ) c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 i x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 + 2 c L − k ^ ⋅ c r 1 + L x ^ / 2 ) c ω L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ]
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] Δ ν ν = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) [ h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 + L c − k ^ ⋅ r ⃗ 1 + L x ^ c ) − h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) ] = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) [ h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) − h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) ] \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
\frac{\Delta \nu}{\nu} &= \frac{\hat{x}^i\hat{x}^j}{2 (1 - \hat{k}\cdot\hat{x})} \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
& = \frac{\hat{x}^i\hat{x}^j}{2(1 - \hat{k}\cdot\hat{x})} \left[\tilde{h}_{ij}(f)e^{i\omega (t|_{\vec{r}_1}+\frac{L}{c} - \hat{k}\cdot\frac{\vec{r}_1 + L\hat{x}}{c}) } - \tilde{h}_{ij}(f)e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \right]\\
& = \frac{\hat{x}^i\hat{x}^j}{2(1 - \hat{k}\cdot\hat{x})} \left[\tilde{h}_{ij}(f)e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c}) } - \tilde{h}_{ij}(f)e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \right]
\end{aligned} Δ t ν Δ ν = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j [ h ~ i j ( f ) e i ω ( t ∣ r 1 + c L − k ^ ⋅ c r 1 + L x ^ ) − h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j [ h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) − h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) ]
傅里叶逆变换
y ( t ) = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) [ h i j ( t ∣ r ⃗ 2 , r ⃗ 2 ) − h i j ( t ∣ r ⃗ 1 , r ⃗ 1 ) ] \boxed{\begin{aligned}
y(t) &= \frac{\hat{x}^i\hat{x}^j}{2(1 - \hat{k}\cdot\hat{x})} \left[ h_{ij}(t|_{\vec{r}_2}, \vec{r}_2) - h_{ij}(t|_{\vec{r}_1}, \vec{r}_1) \right]
\end{aligned}} y ( t ) = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j [ h i j ( t ∣ r 2 , r 2 ) − h i j ( t ∣ r 1 , r 1 ) ]
这里r 1 ⃗ , r 2 ⃗ \vec{r_1}, \vec{r_2} r 1 , r 2 t ∣ r ⃗ 1 , t ∣ r ⃗ 2 t|_{\vec{r}_1}, t|_{\vec{r}_2} t ∣ r 1 , t ∣ r 2 x ^ \hat{x} x ^
z ( t ) = x ^ i x ^ j 2 ( 1 + k ^ ⋅ x ^ ) [ h i j ( t ∣ r ⃗ 2 , r ⃗ 2 ) − h i j ( t ∣ r ⃗ 1 , r ⃗ 1 ) ] \begin{aligned}
z(t) = \frac{\hat{x}^i\hat{x}^j}{2(1 + \hat{k}\cdot\hat{x})} \left[ h_{ij}(t|_{\vec{r}_2}, \vec{r}_2) - h_{ij}(t|_{\vec{r}_1}, \vec{r}_1) \right]
\end{aligned} z ( t ) = 2 ( 1 + k ^ ⋅ x ^ ) x ^ i x ^ j [ h i j ( t ∣ r 2 , r 2 ) − h i j ( t ∣ r 1 , r 1 ) ]
形式上差了个负号,实际上没有区别,只是这里x ^ \hat{x} x ^
两种时间基准下,频移的定义还是一样的吗??
ν r e c v − ν ( t ) ∣ e m ν ( t ) ∣ e m ? ? ν r e c v − ν ( t ) ∣ e m ν ( t ) r e c v ? ? \frac{\nu_{\rm recv}-\nu(t)|_{\rm em}}{\nu(t)|_{\rm em}}?? ~~~~\frac{\nu_{\rm recv}-\nu(t)|_{\rm em}}{\nu(t)_{\rm recv}}??
ν ( t ) ∣ e m ν r e c v − ν ( t ) ∣ e m ? ? ν ( t ) r e c v ν r e c v − ν ( t ) ∣ e m ? ?
z ( t ) ≡ ν ( t ) ∣ r e c v − ν e m ν e m = 1 2 x ^ i x ^ j 1 + k ^ ⋅ x ^ [ h i j ( t ) − h i j ( t − L c ) ] = 1 2 ∑ P x ^ i x ^ j 1 + k ^ ⋅ x ^ e i j P [ h P ( t ) − h P ( t − L c ) ] \begin{aligned}
z(t) &\equiv \frac{\nu(t)|_{\rm recv}-\nu_{\rm em}}{\nu_{\rm em}} = \frac{1}{2} \frac{\hat{x}^i\hat{x}^j}{1 + \hat{k}\cdot\hat{x}} \Big[h_{ij}(t) - h_{ij}(t - {\textstyle \frac{L}{c}})\Big] \\
&= \frac{1}{2} \sum_P \frac{\hat{x}^i\hat{x}^j}{1 + \hat{k}\cdot\hat{x}} e^P_{ij} \Big[h_P(t) - h_P(t - {\textstyle \frac{L}{c}})\Big]
\end{aligned} z ( t ) ≡ ν e m ν ( t ) ∣ r e c v − ν e m = 2 1 1 + k ^ ⋅ x ^ x ^ i x ^ j [ h i j ( t ) − h i j ( t − c L ) ] = 2 1 P ∑ 1 + k ^ ⋅ x ^ x ^ i x ^ j e i j P [ h P ( t ) − h P ( t − c L ) ]
其中x ^ \hat{x} x ^ k ^ \hat{k} k ^ 单臂、单向 的响应,后面仪器响应部分有具体推导。对于脉冲星计时(或单向多普勒)测量,对应的就是单臂、单向测量,x ^ \hat{x} x ^ 1 2 x ^ i x ^ j 1 + k ^ ⋅ x ^ e i j P \frac{1}{2}\frac{\hat{x}^i\hat{x}^j}{1 + \hat{k}\cdot\hat{x}} e^P_{ij} 2 1 1 + k ^ ⋅ x ^ x ^ i x ^ j e i j P
上面公式均以接收端端时间为基准进行测量,另一种形式是以发射端时间为基准,会出现在往返双向测量中,如激光干涉或双向多普勒追踪。注意前面分母中正负号的变化。
z ( t ) ≡ ν ( t ) − ν 0 ν 0 ? ? ν r e c v − ν ( t ) ∣ e m ν ( t ) ∣ e m ? ? = 1 2 x ^ i x ^ j 1 − k ^ ⋅ x ^ [ h i j ( t + L c ) − h i j ( t ) ] z(t) \equiv \frac{\nu(t)-\nu_0}{\nu_0} ?? \frac{\nu_{\rm recv}-\nu(t)|_{\rm em}}{\nu(t)|_{\rm em}}?? = \frac{1}{2} \frac{\hat{x}^i\hat{x}^j}{1 - \hat{k}\cdot\hat{x}} \Big[h_{ij}(t+{\textstyle \frac{L}{c}}) - h_{ij}(t)\Big]
z ( t ) ≡ ν 0 ν ( t ) − ν 0 ? ? ν ( t ) ∣ e m ν r e c v − ν ( t ) ∣ e m ? ? = 2 1 1 − k ^ ⋅ x ^ x ^ i x ^ j [ h i j ( t + c L ) − h i j ( t ) ]
除了这里通过对光子路径积分获得距离变化,对应相位改变,求导可得到频率变化。还可以直接推导频率影响,之后积分得到相位改变。
以激光发射端 为参考
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) e i ω ( 1 − k ^ ⋅ x ^ ) L 2 c L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] Δ ν ν = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) [ h ~ i j ( f ) e i ω [ t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ] − h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) ] \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} e^{i\omega (1-\hat{k} \cdot \hat{x}) \frac{L}{2c}} ~\small \frac{L}{c} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\frac{\Delta \nu}{\nu} &= \frac{\hat{x}^i\hat{x}^j}{2 (1 - \hat{k}\cdot\hat{x})} \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
& = \frac{\hat{x}^i\hat{x}^j}{2(1 - \hat{k}\cdot\hat{x})} \left[\tilde{h}_{ij}(f)e^{i\omega [t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c}] } - \tilde{h}_{ij}(f)e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \right]
\end{aligned} Δ t ν Δ ν = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) e i ω ( 1 − k ^ ⋅ x ^ ) 2 c L c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j [ h ~ i j ( f ) e i ω [ t ∣ r 2 − k ^ ⋅ c r 2 ] − h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) ]
取发射端为原点,r ⃗ 1 = 0 \vec{r}_1 = 0 r 1 = 0
Δ t = 1 2 L c x ^ i x ^ j h ~ i j ( f ) e i ω t e i ω ( 1 − k ^ ⋅ x ^ ) L 2 c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] Δ ν ν = x ^ i x ^ j 2 ( 1 − k ^ ⋅ x ^ ) h ~ i j ( f ) e i ω t [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] \begin{aligned}
\Delta t &= \frac{1}{2}\frac{L}{c}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega t} e^{i\omega (1-\hat{k} \cdot \hat{x}) \frac{L}{2c}} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\frac{\Delta \nu}{\nu} &= \frac{\hat{x}^i\hat{x}^j}{2 (1 - \hat{k}\cdot\hat{x})} \tilde{h}_{ij}(f) e^{i\omega t} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]
\end{aligned} Δ t ν Δ ν = 2 1 c L x ^ i x ^ j h ~ i j ( f ) e i ω t e i ω ( 1 − k ^ ⋅ x ^ ) 2 c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 ( 1 − k ^ ⋅ x ^ ) x ^ i x ^ j h ~ i j ( f ) e i ω t [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ]
以激光接收端 为参考,x ^ \hat{x} x ^
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ 1 − e − i ω ( 1 − k ^ ⋅ x ^ ) L c ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) e − i ω ( 1 − k ^ ⋅ x ^ ) L 2 c L c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] Δ ν ν = x ^ i x ^ j 2 ( 1 + k ^ ⋅ x ^ ) h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) L c ] = x ^ i x ^ j 2 ( 1 + k ^ ⋅ x ^ ) [ h ~ i j ( f ) e i ω ( t ∣ r ⃗ 2 − k ^ ⋅ r ⃗ 2 c ) − h ~ i j ( f ) e i ω ( t ∣ r ⃗ 1 − k ^ ⋅ r ⃗ 1 c ) ] \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[1 - e^{-i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} e^{-i\omega (1- \hat{k} \cdot \hat{x}) \frac{L}{2c} } ~ \small \frac{L}{c} ~ {\rm sinc}\left[\omega(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\frac{\Delta \nu}{\nu} &= \frac{\hat{x}^i\hat{x}^j}{2 (1 + \hat{k}\cdot\hat{x})} \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} \left[1 - e^{-i\omega (1 + \hat{k}\cdot\hat{x})\frac{L}{c}}\right]\\
& = \frac{\hat{x}^i\hat{x}^j}{2(1 + \hat{k}\cdot\hat{x})} \left[\tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_2} - \hat{k}\cdot\frac{\vec{r}_2}{c})} - \tilde{h}_{ij}(f) e^{i\omega (t|_{\vec{r}_1} - \hat{k}\cdot\frac{\vec{r}_1}{c}) } \right]
\end{aligned} Δ t ν Δ ν = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ 1 − e − i ω ( 1 − k ^ ⋅ x ^ ) c L ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) e − i ω ( 1 − k ^ ⋅ x ^ ) 2 c L c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] = 2 ( 1 + k ^ ⋅ x ^ ) x ^ i x ^ j h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) c L ] = 2 ( 1 + k ^ ⋅ x ^ ) x ^ i x ^ j [ h ~ i j ( f ) e i ω ( t ∣ r 2 − k ^ ⋅ c r 2 ) − h ~ i j ( f ) e i ω ( t ∣ r 1 − k ^ ⋅ c r 1 ) ]
取接收端为原点,r ⃗ 2 = 0 \vec{r}_2 =0 r 2 = 0
Δ t = 1 2 L c x ^ i x ^ j h ~ i j ( f ) e i ω t e − i ω ( 1 + k ^ ⋅ x ^ ) L 2 c s i n c [ ω ( 1 + k ^ ⋅ x ^ ) L 2 c ] Δ ν ν = x ^ i x ^ j 2 ( 1 + k ^ ⋅ x ^ ) h ~ i j ( f ) e i ω t [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) L c ] \begin{aligned}
\Delta t &= \frac{1}{2}\frac{L}{c}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega t} e^{-i\omega (1+ \hat{k} \cdot \hat{x}) \frac{L}{2c} } ~ {\rm sinc}\left[\omega(1+\hat{k} \cdot \hat{x}) {\textstyle \frac{L}{2c}}\right]\\
\frac{\Delta \nu}{\nu} &= \frac{\hat{x}^i\hat{x}^j}{2 (1 + \hat{k}\cdot\hat{x})} \tilde{h}_{ij}(f) e^{i\omega t} \left[1 - e^{-i\omega (1 + \hat{k}\cdot\hat{x})\frac{L}{c}}\right]
\end{aligned} Δ t ν Δ ν = 2 1 c L x ^ i x ^ j h ~ i j ( f ) e i ω t e − i ω ( 1 + k ^ ⋅ x ^ ) 2 c L s i n c [ ω ( 1 + k ^ ⋅ x ^ ) 2 c L ] = 2 ( 1 + k ^ ⋅ x ^ ) x ^ i x ^ j h ~ i j ( f ) e i ω t [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) c L ]
最后,对于单臂往返,发射与接收端重合,将最终接收时间t r e c v t_{\rm recv} t r e c v t t t
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ r ⃗ 1 c ) 1 i ω ( 1 + k ^ ⋅ x ^ ) [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) L c ] + 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − 2 L c − k ^ ⋅ r ⃗ 1 c ) 1 i ω ( 1 − k ^ ⋅ x ^ ) [ e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ r ⃗ 1 c ) 1 i ω [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) L c 1 + k ^ ⋅ x ^ + e − i ω 2 L c e i ω ( 1 − k ^ ⋅ x ^ ) L c − 1 1 − k ^ ⋅ x ^ ] = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ r ⃗ 1 c ) L c { e − i ω ( 1 + k ^ ⋅ x ^ ) L 2 c s i n c [ ω ( 1 + k ^ ⋅ x ^ ) L 2 c ] + e − i ω ( 3 + k ^ ⋅ x ^ ) L 2 c s i n c [ ω ( 1 − k ^ ⋅ x ^ ) L 2 c ] } \begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega (1 + \hat{k}\cdot\hat{x})} \left[1 - e^{-i\omega (1 + \hat{k}\cdot\hat{x})\frac{L}{c}}\right]\\
&~~~~~ + \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t - \frac{2L}{c} - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega (1 - \hat{k}\cdot\hat{x})} \left[e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} \small \frac{1}{i\omega} \left[
\frac{1 - e^{-i\omega (1 + \hat{k}\cdot\hat{x})\frac{L}{c}}}{1 + \hat{k}\cdot\hat{x}} + e^{-i\omega \frac{2L}{c}} \frac{e^{i\omega (1 - \hat{k}\cdot\hat{x})\frac{L}{c}}-1}{1 - \hat{k}\cdot\hat{x}}\right]\\
&= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} {\small \frac{L}{c}} \bigg\{ e^{-i\omega (1 + \hat{k}\cdot\hat{x})\frac{L}{2c}} ~ {\rm sinc}\left[\omega (1 + \hat{k}\cdot\hat{x}) {\textstyle \frac{L}{2c}}\right] \\
& ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ + e^{-i\omega (3+\hat{k} \cdot \hat{x}) \frac{L}{2c}} ~ {\rm sinc}\left[\omega (1 - \hat{k}\cdot\hat{x}) {\textstyle \frac{L}{2c}}\right]\bigg\}
\end{aligned} Δ t = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ c r 1 ) i ω ( 1 + k ^ ⋅ x ^ ) 1 [ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) c L ] + 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − c 2 L − k ^ ⋅ c r 1 ) i ω ( 1 − k ^ ⋅ x ^ ) 1 [ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ c r 1 ) i ω 1 [ 1 + k ^ ⋅ x ^ 1 − e − i ω ( 1 + k ^ ⋅ x ^ ) c L + e − i ω c 2 L 1 − k ^ ⋅ x ^ e i ω ( 1 − k ^ ⋅ x ^ ) c L − 1 ] = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ c r 1 ) c L { e − i ω ( 1 + k ^ ⋅ x ^ ) 2 c L s i n c [ ω ( 1 + k ^ ⋅ x ^ ) 2 c L ] + e − i ω ( 3 + k ^ ⋅ x ^ ) 2 c L s i n c [ ω ( 1 − k ^ ⋅ x ^ ) 2 c L ] }
将大括号内部分记为T ( f , k ^ ⋅ x ^ ) \mathcal{T}(f, \hat{k} \cdot \hat{x}) T ( f , k ^ ⋅ x ^ ) f ∗ = c 2 π L f_*=\frac{c}{2\pi L} f ∗ = 2 π L c
Δ t = 1 2 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ r ⃗ 1 c ) L c T ( f , k ^ ⋅ x ^ ) T ( f , k ^ ⋅ x ^ ) ≡ e − i ( 3 + k ^ ⋅ x ^ ) f 2 f ∗ s i n c [ ( 1 − k ^ ⋅ x ^ ) f 2 f ∗ ] + e − i ( 1 + k ^ ⋅ x ^ ) f 2 f ∗ s i n c [ ( 1 + k ^ ⋅ x ^ ) f 2 f ∗ ] = { e − i f 2 f ∗ s i n c [ ( 1 − k ^ ⋅ x ^ ) f 2 f ∗ ] + e i f 2 f ∗ s i n c [ ( 1 + k ^ ⋅ x ^ ) f 2 f ∗ ] } e − i ( 2 + k ^ ⋅ x ^ ) f 2 f ∗ \boxed{\begin{aligned}
\Delta t &= \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) e^{i\omega (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} \frac{L}{c} \mathcal{T}(f, \hat{k} \cdot \hat{x})\\
\small\mathcal{T}(f, \hat{k} \cdot \hat{x}) &\equiv \small e^{-i (3+\hat{k} \cdot \hat{x}) \frac{f}{2f_*}} ~ {\rm sinc}\left[(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{f}{2f_*}}\right] + e^{-i(1+\hat{k} \cdot \hat{x}) \frac{f}{2f_*}} ~ {\rm sinc}\left[(1+\hat{k} \cdot \hat{x}) {\textstyle \frac{f}{2f_*}}\right]\\
&= \small \left\{e^{-i \frac{f}{2f_*}} ~ {\rm sinc}\left[(1-\hat{k} \cdot \hat{x}) {\textstyle \frac{f}{2f_*}}\right] + e^{i \frac{f}{2f_*}} ~ {\rm sinc}\left[(1+\hat{k} \cdot \hat{x}) {\textstyle \frac{f}{2f_*}}\right]\right\} e^{-i(2 + \hat{k} \cdot \hat{x})\frac{f}{2f_*}}
\end{aligned}} Δ t T ( f , k ^ ⋅ x ^ ) = 2 1 x ^ i x ^ j h ~ i j ( f ) e i ω ( t − k ^ ⋅ c r 1 ) c L T ( f , k ^ ⋅ x ^ ) ≡ e − i ( 3 + k ^ ⋅ x ^ ) 2 f ∗ f s i n c [ ( 1 − k ^ ⋅ x ^ ) 2 f ∗ f ] + e − i ( 1 + k ^ ⋅ x ^ ) 2 f ∗ f s i n c [ ( 1 + k ^ ⋅ x ^ ) 2 f ∗ f ] = { e − i 2 f ∗ f s i n c [ ( 1 − k ^ ⋅ x ^ ) 2 f ∗ f ] + e i 2 f ∗ f s i n c [ ( 1 + k ^ ⋅ x ^ ) 2 f ∗ f ] } e − i ( 2 + k ^ ⋅ x ^ ) 2 f ∗ f
一些文章将T ( f , k ^ ⋅ x ^ ) \mathcal{T}(f, \hat{k} \cdot \hat{x}) T ( f , k ^ ⋅ x ^ ) e − i ( 2 + k ^ ⋅ x ^ ) f 2 f ∗ e^{-i(2 + \hat{k} \cdot \hat{x})\frac{f}{2f_*}} e − i ( 2 + k ^ ⋅ x ^ ) 2 f ∗ f e − i 2 n f 2 f ∗ sin ( 2 n f 2 f ∗ ) n sin ( 2 f 2 f ∗ ) e^{-i 2n\frac{f}{2f_*}} \frac{\sin(2n\frac{f}{2f_*})}{n\sin(2\frac{f}{2f_*})} e − i 2 n 2 f ∗ f n s i n ( 2 2 f ∗ f ) s i n ( 2 n 2 f ∗ f )
如果将上述时间变化量转换为对应的无量纲应变响应,有:
s ( f , t , x ^ , k ^ , r ⃗ 1 ) ≡ Δ ℓ ℓ = c Δ t 2 L = 1 2 x ^ i x ^ j h ~ i j ( f ) e i 2 π f ( t − k ^ ⋅ r ⃗ 1 c ) 1 2 T ( f , k ^ ⋅ x ^ ) \begin{aligned}
s(f, t, \hat{x}, \hat{k}, \vec{r}_1) &\equiv {\small \frac{\Delta \ell}{\ell}} = {\small \frac{c \Delta t}{2L}} = \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f)e^{i 2\pi f (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} ~\frac{1}{2}\mathcal{T}(f, \hat{k} \cdot \hat{x})
\end{aligned} s ( f , t , x ^ , k ^ , r 1 ) ≡ ℓ Δ ℓ = 2 L c Δ t = 2 1 x ^ i x ^ j h ~ i j ( f ) e i 2 π f ( t − k ^ ⋅ c r 1 ) 2 1 T ( f , k ^ ⋅ x ^ )
c Δ t c \Delta t c Δ t T \mathcal{T} T T / 2 \mathcal{T}/2 T / 2
s ( f , t , x ^ , k ^ , r ⃗ 1 ) ≡ Δ L L = c Δ t L = 1 2 x ^ i x ^ j h ~ i j ( f ) e i 2 π f ( t − k ^ ⋅ r ⃗ 1 c ) T ( f , k ^ ⋅ x ^ ) \begin{aligned}
s(f, t, \hat{x}, \hat{k}, \vec{r}_1) &\equiv {\small \frac{\Delta L}{L}} = {\small \frac{c \Delta t}{L}} = \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f)e^{i 2\pi f (t - \hat{k}\cdot\frac{\vec{r}_1}{c})} ~\mathcal{T}(f, \hat{k} \cdot \hat{x})
\end{aligned} s ( f , t , x ^ , k ^ , r 1 ) ≡ L Δ L = L c Δ t = 2 1 x ^ i x ^ j h ~ i j ( f ) e i 2 π f ( t − k ^ ⋅ c r 1 ) T ( f , k ^ ⋅ x ^ )
s ( f , t ) s(f,t) s ( f , t ) h ~ i j ( f ) e i ω t \tilde{h}_{ij}(f)e^{i\omega t} h ~ i j ( f ) e i ω t e − i 2 π f k ^ ⋅ r ⃗ 1 c ) e^{-i 2\pi f \hat{k}\cdot\frac{\vec{r}_1}{c})} e − i 2 π f k ^ ⋅ c r 1 ) s ∝ h ~ i j ( f ) e i ω t s \propto \tilde{h}_{ij}(f)e^{i\omega t} s ∝ h ~ i j ( f ) e i ω t D \mathscr{D} D
s ( t ) = D ( h i j ( t ) ) = D ( ∫ h ~ i j ( f ) e i 2 π f t d f ) = ∫ D ( h ~ i j ( f ) e i 2 π f t ) d f = ∫ s ( f , t ) d f = ∫ d f 1 2 x ^ i x ^ j h ~ i j ( f ) e i 2 π f t T ( f , k ^ ⋅ x ^ ) = ∫ [ 1 2 x ^ i x ^ j h ~ i j ( f ) T ( f , k ^ ⋅ x ^ ) ] e i 2 π f t d f \begin{aligned}
s(t) &= \mathscr{D}\left(h_{ij}(t)\right) = \mathscr{D}\left(\int \tilde{h}_{ij}(f)e^{i 2\pi f t} df\right)\\
&= \int \mathscr{D}\left(\tilde{h}_{ij}(f)e^{i 2\pi f t}\right) df = \int s(f, t) df\\
&= \int df ~ \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f)e^{i 2\pi f t} ~\mathcal{T}(f, \hat{k} \cdot \hat{x})\\
&= \int \left[ \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f)~\mathcal{T}(f, \hat{k} \cdot \hat{x})\right] ~e^{i 2\pi f t} df
\end{aligned} s ( t ) = D ( h i j ( t ) ) = D ( ∫ h ~ i j ( f ) e i 2 π f t d f ) = ∫ D ( h ~ i j ( f ) e i 2 π f t ) d f = ∫ s ( f , t ) d f = ∫ d f 2 1 x ^ i x ^ j h ~ i j ( f ) e i 2 π f t T ( f , k ^ ⋅ x ^ ) = ∫ [ 2 1 x ^ i x ^ j h ~ i j ( f ) T ( f , k ^ ⋅ x ^ ) ] e i 2 π f t d f
s ~ ( f ) = F { s ( t ) } = 1 2 x ^ i x ^ j h ~ i j ( f ) T ( f , k ^ ⋅ x ^ ) \begin{aligned}
\tilde{s}(f) &= \mathcal{F}\left\{s(t)\right\} = \frac{1}{2}\hat{x}^i\hat{x}^j \tilde{h}_{ij}(f) \mathcal{T}(f, \hat{k} \cdot \hat{x})
\end{aligned} s ~ ( f ) = F { s ( t ) } = 2 1 x ^ i x ^ j h ~ i j ( f ) T ( f , k ^ ⋅ x ^ )
定义系统的转移函数
F P ( f ) = 1 2 x ^ i x ^ j e i j P T ( f , k ^ ⋅ x ^ ) F^P(f) = \frac{1}{2}\hat{x}^i \hat{x}^j e_{ij}^P~\mathcal{T}(f, \hat{k} \cdot \hat{x})
F P ( f ) = 2 1 x ^ i x ^ j e i j P T ( f , k ^ ⋅ x ^ )
从而对频域信号:
s ~ ( f ) = F P ( f ) h ~ P ( f ) = F + ( f ) h ~ + ( f ) + F × ( f ) h ~ × ( f ) \tilde{s}(f) = F^P(f) \tilde{h}_P(f) = F^+(f)\tilde{h}_+(f) + F^\times(f)\tilde{h}_\times(f)
s ~ ( f ) = F P ( f ) h ~ P ( f ) = F + ( f ) h ~ + ( f ) + F × ( f ) h ~ × ( f )
至此,考虑的还只是单臂往返的响应,对于双臂干涉情况,系统转移函数为:
F P ( f ) = 1 2 [ x ^ i x ^ j e i j P T ( f , k ^ ⋅ x ^ ) − y ^ i y ^ j e i j P T ( f , k ^ ⋅ y ^ ) ] \boxed{F^P(f) = \frac{1}{2}\left[\hat{x}^i \hat{x}^j e_{ij}^P~\mathcal{T}(f, \hat{k} \cdot \hat{x}) - \hat{y}^i \hat{y}^j e_{ij}^P~\mathcal{T}(f, \hat{k} \cdot \hat{y})\right]}
F P ( f ) = 2 1 [ x ^ i x ^ j e i j P T ( f , k ^ ⋅ x ^ ) − y ^ i y ^ j e i j P T ( f , k ^ ⋅ y ^ ) ]
D P ( f ) = D i j e i j P ; D i j = 1 2 [ x ^ i x ^ j T ( f , k ^ ⋅ x ^ ) − y ^ i y ^ j T ( f , k ^ ⋅ y ^ ) ] \boxed{D^P(f) = D^{ij} e_{ij}^P; ~~~ D^{ij} = \frac{1}{2}\left[\hat{x}^i \hat{x}^j ~\mathcal{T}(f, \hat{k} \cdot \hat{x}) - \hat{y}^i \hat{y}^j ~\mathcal{T}(f, \hat{k} \cdot \hat{y})\right]}
D P ( f ) = D i j e i j P ; D i j = 2 1 [ x ^ i x ^ j T ( f , k ^ ⋅ x ^ ) − y ^ i y ^ j T ( f , k ^ ⋅ y ^ ) ]
在长波近似下,T ( f , θ , φ ) ∼ 1 \mathcal{T}(f, \theta, \varphi) \sim 1 T ( f , θ , φ ) ∼ 1 F P ( t ) F^P(t) F P ( t ) F P F^P F P h ~ P ( f ) \tilde{h}_P(f) h ~ P ( f ) δ \delta δ δ \delta δ
常见的,依然是频域函数,是
s ( t ) = F P h P ( t ) = F + h + ( t ) + F × h × ( t ) s(t) = F^P h_P(t) = F^+ h_+(t) + F^\times h_\times(t)
s ( t ) = F P h P ( t ) = F + h + ( t ) + F × h × ( t )
长波极限近似 k ^ \hat{k} k ^
地面探测器处于长波极限(L ≪ λ),可以将整个探测器作为参考系。
不但不满足长波近似,考虑到超长的臂长必须考虑光传播的时间,其中之一就是在发射激光时不是指向卫星当前位置,而是约8s(L/c)之后的位置,需在不引入额外光程及抖动限制下,对反射镜指向进行超前瞄准调控。
探测器运动调制
对于地基探测器,存在地球自转和公转
通常波源位置会通过赤道或黄道天球坐标描述,而空间探测中探测器位于地球公转轨道,信号投影时需要通过黄道天球坐标系建立波源与探测的联系。考虑到探测器的公转及自转,信号的投影也将随时间演化。此外,探测器的轨道运动本身(非惯性系),还将在信号中引入额外调制。
坐标变换
信号调制 (多普勒调制)
h d e t ( t ) = h S S B ( t − k ^ ⋅ r ⃗ d e t c ) = h S S B ( t ) e − i ω k ^ ⋅ r ⃗ d e t c \bm{h}_{\rm det}(t) = \bm{h}_{\rm \tiny SSB}\left(t - \hat{k}\cdot\frac{\vec{r}_{\rm det}}{c}\right) = \bm{h}_{\rm \tiny SSB}(t) e^{- i\omega\hat{k}\cdot\frac{\vec{r}_{\rm det}}{c}}
h d e t ( t ) = h S S B ( t − k ^ ⋅ c r d e t ) = h S S B ( t ) e − i ω k ^ ⋅ c r d e t
噪声与灵敏度
前面的信噪比分析主要涉及信号的(功率)响应以及噪声功率谱,信号响应前面章节已经讨论过,本节的关注点是探测器的噪声分析。
噪声转换
空间测量中存在多种噪声,表现形式涉及位移l l l ϕ \phi ϕ ν \nu ν v v v a a a ν \nu ν ν 0 , λ 0 \nu_0, \lambda_0 ν 0 , λ 0 f f f ω , λ G W \omega, \lambda_{\rm GW} ω , λ G W
涉及到的物理量之间的转换
用于测量的激光信号可用电场强度表征:
E ( t ) = E 0 ( t ) e j φ ( t ) = E 0 ( t ) e j [ 2 π ν 0 t + ϕ ( t ) ] E(t) = E_0(t) e^{j\varphi(t)} = E_0(t) e^{j[2\pi\nu_0 t + \phi(t)]}
E ( t ) = E 0 ( t ) e j φ ( t ) = E 0 ( t ) e j [ 2 π ν 0 t + ϕ ( t ) ]
这里E 0 ( t ) E_0(t) E 0 ( t ) φ ( t ) \varphi(t) φ ( t ) 角 频率。ν 0 \nu_0 ν 0 ϕ ( t ) \phi(t) ϕ ( t ) φ ( t ) \varphi(t) φ ( t ) 2 π ν 0 t 2\pi\nu_0 t 2 π ν 0 t ϕ ( t ) \phi(t) ϕ ( t )
ω ( t ) = φ ˙ ( t ) , ν ( t ) = φ ˙ ( t ) 2 π = ν 0 + ϕ ˙ ( t ) 2 π ; φ ( t ) = 2 π ∫ t 0 t ν ( τ ) d τ \omega(t) = \dot{\varphi}(t), ~~~ \nu(t) = \frac{\dot{\varphi}(t)}{2\pi} = \nu_0 + \frac{\dot{\phi}(t)}{2\pi}; ~~~ \varphi(t) = 2\pi \int_{t_0}^t\nu(\tau)d\tau
ω ( t ) = φ ˙ ( t ) , ν ( t ) = 2 π φ ˙ ( t ) = ν 0 + 2 π ϕ ˙ ( t ) ; φ ( t ) = 2 π ∫ t 0 t ν ( τ ) d τ
除了相位与频率外,另两个常用的描述相位演化的物理量是计时抖动(timing jitter)x ( t ) x(t) x ( t ) y ( t ) y(t) y ( t ) ν 0 \nu_0 ν 0 ϕ ( t ) \phi(t) ϕ ( t ) φ ( t ) \varphi(t) φ ( t ) ν ( t ) \nu(t) ν ( t ) ν 0 \nu_0 ν 0
x ( t ) = ϕ ( t ) 2 π ν 0 = φ ( t ) 2 π ν 0 − t ; y ( t ) = x ˙ ( t ) = ν ( t ) − ν 0 ν 0 x(t) = \frac{\phi(t)}{2\pi\nu_0} = \frac{\varphi(t)}{2\pi\nu_0} - t; ~~~~~ y(t) = \dot{x}(t) = \frac{\nu(t)-\nu_0}{\nu_0}
x ( t ) = 2 π ν 0 ϕ ( t ) = 2 π ν 0 φ ( t ) − t ; y ( t ) = x ˙ ( t ) = ν 0 ν ( t ) − ν 0
位移:h = l L ; S h = 1 L S l h = \frac{l}{L}; ~~~~~~ \sqrt{S_h} = \frac{1}{L}\sqrt{S_l}
h = L l ; S h = L 1 S l
相位:ϕ = 2 π ν 0 l c = 2 π l λ 0 ; S l = λ 0 2 π S ϕ ; S h = 1 L λ 0 2 π S ϕ \phi = 2\pi \nu_0 \frac{l}{c} = 2\pi \frac{l}{\lambda_0}; ~~~ \sqrt{S_l} = \frac{\lambda_0}{2\pi}\sqrt{S_\phi}; ~~~ \sqrt{S_h} = \frac{1}{L} \frac{\lambda_0}{2\pi}\sqrt{S_\phi}
ϕ = 2 π ν 0 c l = 2 π λ 0 l ; S l = 2 π λ 0 S ϕ ; S h = L 1 2 π λ 0 S ϕ
计时抖动(timing jitter):x ( t ) ≡ ϕ 2 π ν 0 = l c ; S l = c S x ; S h = 1 L / c S x x(t) \equiv \frac{\phi}{2\pi\nu_0} = \frac{l}{c}; ~~~~~ \sqrt{S_l} = c \sqrt{S_x}; ~~~~~ \sqrt{S_h} = \frac{1}{L/c} \sqrt{S_x}
x ( t ) ≡ 2 π ν 0 ϕ = c l ; S l = c S x ; S h = L / c 1 S x
速度:v = l ˙ ; S l = 1 2 π f S v ; S h = 1 L 1 2 π f S v v = \dot{l}; ~~~~~~ \sqrt{S_l} = \frac{1}{2\pi f} \sqrt{S_v}; ~~~~~ \sqrt{S_h} = \frac{1}{L} \frac{1}{2\pi f} \sqrt{S_v}
v = l ˙ ; S l = 2 π f 1 S v ; S h = L 1 2 π f 1 S v
频率:ν = ν 0 + ϕ ˙ 2 π ; S ϕ = 1 f S ν ; S h = 1 L λ 0 2 π f S ν \nu = \nu_0 + \frac{\dot{\phi}}{2\pi}; ~~~~~ \sqrt{S_\phi} = \frac{1}{f} \sqrt{S_\nu}; ~~~~~ \sqrt{S_h} = \frac{1}{L} \frac{\lambda_0}{2\pi f} \sqrt{S_\nu}
ν = ν 0 + 2 π ϕ ˙ ; S ϕ = f 1 S ν ; S h = L 1 2 π f λ 0 S ν
ν = ν 0 + ϕ ˙ 2 π = ( 1 + v c ) ν 0 ; v = c ν − ν 0 ν 0 ; S v = λ 0 S ν \nu = \nu_0 + \frac{\dot{\phi}}{2\pi} = (1+\frac{v}{c})\nu_0; ~~~ v = c\frac{\nu-\nu_0}{\nu_0}; ~~~ \sqrt{S_v} = \lambda_0 \sqrt{S_\nu}
ν = ν 0 + 2 π ϕ ˙ = ( 1 + c v ) ν 0 ; v = c ν 0 ν − ν 0 ; S v = λ 0 S ν
分数频移:y ( t ) ≡ ν − ν 0 ν 0 = v c ; S ν = ν 0 S y ; S h = 1 L / c 1 2 π f S y y(t) \equiv \frac{\nu-\nu_0}{\nu_0} = \frac{v}{c}; ~~~ \sqrt{S_\nu} = \nu_0 \sqrt{S_y}; ~~~ \sqrt{S_h} = \frac{1}{L/c} \frac{1}{2\pi f} \sqrt{S_y}
y ( t ) ≡ ν 0 ν − ν 0 = c v ; S ν = ν 0 S y ; S h = L / c 1 2 π f 1 S y
加速度:a = v ˙ ; S v = 1 2 π f S a ; S h = 1 L 1 ( 2 π f ) 2 S a a = \dot{v}; ~~~~~ \sqrt{S_v} = \frac{1}{2\pi f} \sqrt{S_a}; ~~~~~ \sqrt{S_h} = \frac{1}{L} \frac{1}{(2\pi f)^2} \sqrt{S_a}
a = v ˙ ; S v = 2 π f 1 S a ; S h = L 1 ( 2 π f ) 2 1 S a
a = v ˙ = c y ˙ = c ν 0 ν ˙ = λ 0 ν ˙ ; y ˙ = ν ˙ ν 0 = a c a = \dot{v} = c ~\dot{y} = \frac{c}{\nu_0}\dot{\nu} = \lambda_0\dot{\nu}; ~~~~~~~~ \dot{y} = \frac{\dot{\nu}}{\nu_0} = \frac{a}{c}~~~~~~
a = v ˙ = c y ˙ = ν 0 c ν ˙ = λ 0 ν ˙ ; y ˙ = ν 0 ν ˙ = c a
啁啾度(chirpyness):频率导数γ = ν ˙ = 1 λ 0 a \displaystyle \gamma = \dot{\nu} = \frac{1}{\lambda_0}a γ = ν ˙ = λ 0 1 a
注意,这里讨论的都是单程噪声,单臂往返光路中光程会由L L L 2 L 2L 2 L 传递函数 ,可参考后面灵敏度曲线部分。
上面各种形式噪声中,位移与相位及计时抖动、速度与频率及分数频移、加速度与频率导数(啁啾度)分别对应,各自间呈简单比例关系,功率谱有相同的频率依赖。三类噪声之间通过求导(积分)转换,对应到频域会出现2 π f 2\pi f 2 π f 1 2 π f \frac{1}{2\pi f} 2 π f 1 1 ( 2 π f ) 2 \frac{1}{(2\pi f)^2} ( 2 π f ) 2 1
l = c x = c ϕ 2 π ν 0 ; v = c x ˙ = c y = c ν − ν 0 ν 0 ; a = c y ˙ = c ν ˙ ν 0 l = c ~ x = c\frac{\phi}{2\pi\nu_0}; ~~~~~ v= c ~ \dot{x} = c ~ y = c\frac{\nu-\nu_0}{\nu_0}; ~~~~~ a = c ~ \dot{y} = c \frac{\dot{\nu}}{\nu_0}
l = c x = c 2 π ν 0 ϕ ; v = c x ˙ = c y = c ν 0 ν − ν 0 ; a = c y ˙ = c ν 0 ν ˙
注意,相位、频率及频率导数形式的噪声都依赖于载波(如激光)频率,通过降低基准频率就可降低噪声的绝对数值,相对的,计时抖动和分数频率则约化了基准频率的影响。在讨论相位或频率噪声时,必须给定载波频率才有意义。同时在不同噪声间进行对比或转换时,需根据具体情况选择合适形式。比如对于LISA L ∼ 2.5 × 1 0 9 m , f ∼ 1 m H z ~\small L\sim 2.5\times 10^9 {\rm m}, f \sim 1 {\rm mHz} L ∼ 2 . 5 × 1 0 9 m , f ∼ 1 m H z S h ∼ 1 0 − 20 / H z \small \sqrt{S_h} \sim 10^{-20}/\rm \sqrt{Hz} S h ∼ 1 0 − 2 0 / H z S ϕ ∼ 15 μ r a d / H z ∼ μ c y c l e / H z \small \sqrt{S_\phi} \sim 15 \rm \mu rad/\sqrt{Hz} \sim \mu cycle/\sqrt{Hz} S ϕ ∼ 1 5 μ r a d / H z ∼ μ c y c l e / H z 20 M H z \small 20 \rm MHz 2 0 M H z 20 M H z \small 20 \rm MHz 2 0 M H z S x ∼ 1 0 − 13 s / H z \small \sqrt{S_x} \sim 10^{-13} \rm s/\sqrt{Hz} S x ∼ 1 0 − 1 3 s / H z S y ∼ 1 0 − 15 / H z \small \sqrt{S_y} \sim 10^{-15} \rm /\sqrt{Hz} S y ∼ 1 0 − 1 5 / H z
此外值得注意的是分数频率,与应变一样,分数频率也是无量纲量,而且两者在量级上也很接近,对空间观测S h ∼ 20 S y \small \sqrt{S_h} \sim 20 \sqrt{S_y} S h ∼ 2 0 S y S h ∼ 1 / 2 S y \small \sqrt{S_h} \sim 1/2 \sqrt{S_y} S h ∼ 1 / 2 S y S ν ∼ 30 H z / H z \small \sqrt{S_\nu} \sim 30\rm Hz/\sqrt{Hz} S ν ∼ 3 0 H z / H z 2.8 × 1 0 14 H z \small 2.8 \times 10^{14} \rm Hz 2 . 8 × 1 0 1 4 H z S y ∼ 1 0 − 13 / H z \small \sqrt{S_y} \sim 10^{-13}/\sqrt{\rm Hz} S y ∼ 1 0 − 1 3 / H z S h ∼ 1 0 − 12 / H z \small \sqrt{S_h} \sim 10^{-12}/\sqrt{\rm Hz} S h ∼ 1 0 − 1 2 / H z
实际的引力波观测是对两个臂的激光进行干涉,相位作差,上面介绍的转换关系隐含了假设噪声源在干涉测量中独立。尤其是对频率而言,激光内禀的频率噪声不能简单套用上述公式,因为激光频率不稳定性在干涉测量中是相关的。简单的,以臂长不相等的分光干涉为例,干涉测量的相位差:
Δ ϕ ( t ) = ϕ ( t − 2 L 1 c ) − ϕ ( t − 2 L 2 c ) = ϕ ( t − 2 L 1 c ) − ϕ ( t − 2 L 1 c + 2 Δ L c ) \Delta \phi(t) = \phi(t- \frac{2L_1}{c}) - \phi(t- \frac{2L_2}{c}) = \phi(t- \frac{2L_1}{c}) - \phi(t- \frac{2L_1}{c} + \frac{2\Delta L}{c})
Δ ϕ ( t ) = ϕ ( t − c 2 L 1 ) − ϕ ( t − c 2 L 2 ) = ϕ ( t − c 2 L 1 ) − ϕ ( t − c 2 L 1 + c 2 Δ L )
其中Δ L = L 1 − L 2 \Delta L= L_1 - L_2 Δ L = L 1 − L 2
Δ ϕ ~ ( f ) = ϕ ~ ( f − 2 L 1 / c ) ( 1 − e i ω 2 Δ L c ) ≈ ϕ ~ ( f − 2 L 1 / c ) ⋅ − i ω 2 Δ L c \widetilde{\Delta \phi}(f) = \tilde{\phi}(f - 2L_1/c) \left(1 - e^{i \omega \frac{2\Delta L}{c}}\right) \approx \tilde{\phi}(f - 2L_1/c) \cdot - i \omega \frac{2\Delta L}{c}
Δ ϕ ( f ) = ϕ ~ ( f − 2 L 1 / c ) ( 1 − e i ω c 2 Δ L ) ≈ ϕ ~ ( f − 2 L 1 / c ) ⋅ − i ω c 2 Δ L
取f ∼ 1 m H z , Δ L ∼ 0.01 L = 3 × 1 0 4 k m ∼ 0.1 s \small f \sim 1 {\rm mHz}, \Delta L \sim 0.01L = 3\times 10^4 \rm km \sim 0.1 s f ∼ 1 m H z , Δ L ∼ 0 . 0 1 L = 3 × 1 0 4 k m ∼ 0 . 1 s ω 2 Δ L c = 4 π f Δ L c ∼ 1 0 − 3 \small \omega \frac{2\Delta L}{c} = 4\pi f \frac{\Delta L}{c} \sim 10^{-3} ω c 2 Δ L = 4 π f c Δ L ∼ 1 0 − 3 Δ L c f = Δ L λ G W ≪ 1 \frac{\Delta L}{c} f = \frac{\Delta L}{\lambda_{\rm GW}} \ll 1 c Δ L f = λ G W Δ L ≪ 1
S Δ ϕ = 4 π Δ L c f S ϕ , S Δ ϕ / S ϕ = 4 π Δ L c f ∼ 1 0 − 3 f 1 m H z \sqrt{S_{\Delta \phi}} = 4\pi \frac{\Delta L}{c} f \sqrt{S_\phi}, ~~~~~ \sqrt{S_{\Delta \phi}} / \sqrt{S_\phi} = 4\pi \frac{\Delta L}{c} f \sim 10^{-3}\frac{f}{1\rm mHz}
S Δ ϕ = 4 π c Δ L f S ϕ , S Δ ϕ / S ϕ = 4 π c Δ L f ∼ 1 0 − 3 1 m H z f
由于激光频率噪声的相关性,干涉测量中的残余噪声仅为原始值的千分之一。之后可正常使用前面的噪声转换关系,最终引入的应变噪声与原始噪声谱关系为:
S f r e q h = 1 L λ 0 2 π S Δ ϕ = 2 Δ L L f ν 0 S ϕ = 2 Δ L L 1 ν 0 S ν = 2 Δ L L S y \sqrt{S^h_{\rm freq}} = \frac{1}{L} \frac{\lambda_0}{2\pi} \sqrt{S_{\Delta \phi}} = 2 \frac{\Delta L}{L}\frac{f}{\nu_0} \sqrt{S_\phi} = 2 \frac{\Delta L}{L}\frac{1}{\nu_0} \sqrt{S_\nu} = 2 \frac{\Delta L}{L} \sqrt{S_y}
S f r e q h = L 1 2 π λ 0 S Δ ϕ = 2 L Δ L ν 0 f S ϕ = 2 L Δ L ν 0 1 S ν = 2 L Δ L S y
实际的空间测量,虽然并非简单的分光干涉,但通过利用外差测量及锁相技术,不同方向上的激光相位同样保持相关,效果上与这里讨论的分光干涉一致。
对Δ ϕ = 2 π ν 2 Δ L c \Delta\phi=2\pi\nu\frac{2\Delta L}{c} Δ ϕ = 2 π ν c 2 Δ L
δ ϕ = 4 π c ( δ ν Δ L + ν δ L ) = Δ ϕ ( δ ν ν + δ L Δ L ) \delta\phi = \frac{4\pi}{c}\left(\delta\nu \Delta L + \nu \delta L\right) = \Delta\phi \left(\frac{\delta\nu}{\nu} + \frac{\delta L}{\Delta L}\right)
δ ϕ = c 4 π ( δ ν Δ L + ν δ L ) = Δ ϕ ( ν δ ν + Δ L δ L )
除了上述严格推导,考虑到最终观测量是干涉测量的相位差,粗略地有:
Δ ϕ ( t ) = 2 π ν 0 2 Δ L c \Delta\phi(t) = 2\pi \nu_0\frac{2 \Delta L}{c}
Δ ϕ ( t ) = 2 π ν 0 c 2 Δ L
注意这里其实已经暗含利用了相位的相关性。对于观测到的相位差而言,频率的相对波动与臂长差的相对波动是无法区分的:
4 π ν 0 c ( 1 + δ ν ν 0 ) Δ L ↔ 4 π ν 0 c ( 1 + δ L Δ L ) Δ L \frac{4\pi \nu_0}{c}(1+\frac{\delta \nu}{\nu_0}) \Delta L ~~~ \leftrightarrow ~~~ \frac{4\pi \nu_0}{c}(1+\frac{\delta L}{\Delta L}) \Delta L
c 4 π ν 0 ( 1 + ν 0 δ ν ) Δ L ↔ c 4 π ν 0 ( 1 + Δ L δ L ) Δ L
频率不稳定性可转为为臂长的相对不稳定性,影响最终的引力波应变测量:
h ∼ δ L L ↔ Δ L L δ ν ν 0 h \sim \frac{\delta L}{L} \leftrightarrow \frac{\Delta L}{L} \frac{\delta \nu}{\nu_0}
h ∼ L δ L ↔ L Δ L ν 0 δ ν
从而,激光频率不稳定性所贡献的应变噪声水平为:
S f r e q h = Δ L L S y \sqrt{S_{\rm freq}^h} = \frac{\Delta L}{L} ~ \sqrt{S_y}
S f r e q h = L Δ L S y
与前面的分析差了一个2倍,不清楚问题在哪。
最后,简单进行估算,空间探测中激光分数频率噪声S y ∼ 1 0 − 13 / H z \small \sqrt{S_y} \sim 10^{-13}/\sqrt{\rm Hz} S y ∼ 1 0 − 1 3 / H z S f r e q h ∼ 1 0 − 15 / H z \small \sqrt{S_{\rm freq}^h} \sim 10^{-15}/\sqrt{\rm Hz} S f r e q h ∼ 1 0 − 1 5 / H z Δ L L ∼ 5 × 1 0 − 5 \small \frac{\Delta L}{L} \sim 5 \times 10^{-5} L Δ L ∼ 5 × 1 0 − 5 S ν ∼ 1 0 − 6 H z / H z , S y ∼ 4 × 1 0 − 21 H z / H z \small \sqrt{S_\nu} \sim 10^{-6}{\rm Hz/\sqrt{Hz}}, \sqrt{S_y} \sim 4 \times 10^{-21}\rm Hz/\sqrt{Hz} S ν ∼ 1 0 − 6 H z / H z , S y ∼ 4 × 1 0 − 2 1 H z / H z S f r e q h ∼ 1 0 − 25 / H z \small \sqrt{S_{\rm freq}^h} \sim 10^{-25}/\rm \sqrt{Hz} S f r e q h ∼ 1 0 − 2 5 / H z
地基观测的激光稳定性是满足需求的(∼ 1 0 − 21 \small \sim 10^{-21} ∼ 1 0 − 2 1 ∼ 1 0 − 20 \small \sim 10^{-20} ∼ 1 0 − 2 0 L ∼ 1000 k m \small L\sim 1000 \rm km L ∼ 1 0 0 0 k m Δ L ∼ 50 m \small \Delta L\sim 50 \rm m Δ L ∼ 5 0 m 4 π Δ L c f ∼ 2 × 1 0 − 4 f 100 H z \small 4\pi \frac{\Delta L}{c} f \sim 2 \times 10^{-4}\frac{f}{100\rm Hz} 4 π c Δ L f ∼ 2 × 1 0 − 4 1 0 0 H z f ∼ 4 × 1 0 − 8 \small \sim 4\times 10^{-8} ∼ 4 × 1 0 − 8
为达到与地面相当的噪声水平,相对臂长差需要比地面低7~8个量级,达到1 0 − 12 10^{-12} 1 0 − 1 2 Δ L ∼ 1 0 − 8 L ∼ 30 m ∼ 1 0 − 7 s \small \Delta L \sim 10^{-8} L \sim 30\rm m \sim 10^{-7}s Δ L ∼ 1 0 − 8 L ∼ 3 0 m ∼ 1 0 − 7 s S f r e q h ∼ 1 0 − 21 / H z \small \sqrt{S_{\rm freq}^h} \sim 10^{-21}/\sqrt{\rm Hz} S f r e q h ∼ 1 0 − 2 1 / H z Δ L ∼ 1 0 − 12 L ∼ 3 m m ∼ 1 0 − 11 s \small \Delta L \sim 10^{-12} L \sim 3\rm mm \sim 10^{-11}s Δ L ∼ 1 0 − 1 2 L ∼ 3 m m ∼ 1 0 − 1 1 s S f r e q h ∼ 1 0 − 25 / H z \small \sqrt{S_{\rm freq}^h} \sim 10^{-25}/\sqrt{\rm Hz} S f r e q h ∼ 1 0 − 2 5 / H z Δ L ∼ 30 m m \small \Delta L \sim 30\rm mm Δ L ∼ 3 0 m m S f r e q h ∼ 1 0 − 24 / H z \small \sqrt{S_{\rm freq}^h} \sim 10^{-24}/\sqrt{\rm Hz} S f r e q h ∼ 1 0 − 2 4 / H z
噪声曲线
在经过TDI等噪声抑制处理,决定探测器灵敏度的次级噪声主要可分为两种,加速噪声与位移噪声。( 2 π f ) 4 (2\pi f)^4 ( 2 π f ) 4
N a c c ( f ) = ( 3 f m / s 2 / H z ) 2 ⋅ [ 1 + ( 0.4 m H z f ) 2 ] ⋅ [ 1 + ( f 8 m H z ) 4 ] N_{\rm acc}(f)=\left(3 ~ {\rm fm}/s^2/\sqrt{\rm Hz}\right)^2\cdot \small \left[1+\left(\frac{0.4 \rm mHz}{f}\right)^2\right]\cdot\left[1+\left(\frac{f}{8 \rm mHz}\right)^4\right]
N a c c ( f ) = ( 3 f m / s 2 / H z ) 2 ⋅ [ 1 + ( f 0 . 4 m H z ) 2 ] ⋅ [ 1 + ( 8 m H z f ) 4 ]
N a c c h ( f ) = 1 L 1 ( 2 π f ) 2 S a c c ( f ) = 4.7 × 1 0 − 22 / H z [ 1 + ( 0.4 m H z f ) 2 ] ⋅ [ 1 + ( 8 m H z f ) 4 ] \small \sqrt{N^h_{\rm acc}(f)} = \frac{1}{L} \frac{1}{(2\pi f)^2}\sqrt{S_{\rm acc}(f)} = 4.7\times 10^{-22}/\sqrt{\rm Hz} \sqrt{\footnotesize \left[1+\left(\frac{0.4 \rm mHz}{f}\right)^2\right]\cdot\left[1+\left(\frac{8 \rm mHz}{f}\right)^4\right]}
N a c c h ( f ) = L 1 ( 2 π f ) 2 1 S a c c ( f ) = 4 . 7 × 1 0 − 2 2 / H z [ 1 + ( f 0 . 4 m H z ) 2 ] ⋅ [ 1 + ( f 8 m H z ) 4 ]
可以看到加速噪声本身,由两项分别在不同频段占据主导:0.4 m H z 0.4 \rm mHz 0 . 4 m H z N a c c ∝ f − 1 \sqrt{N_{\rm acc}} \propto f^{-1} N a c c ∝ f − 1 8 m H z 8 \rm mHz 8 m H z ∝ f 2 \propto f^{2} ∝ f 2 8 m H z 8 \rm mHz 8 m H z N a c c h ∝ f − 2 \sqrt{N^h_{\rm acc}} \propto f^{-2} N a c c h ∝ f − 2 8 m H z 8 \rm mHz 8 m H z
跟最终灵敏度曲线还差了20/3的常数倍,源自仪器的响应,有待确认
位移噪声 (Displacement Noise)
N s h o t ϕ = h ν 0 η P i n , P i n = ( D 2 2 λ 0 L ) 2 P E N^\phi_{\rm shot} = \frac{h\nu_0}{\eta P_{\rm in}}, ~~~ P_{\rm in} = \left(\frac{D^2}{2 \lambda_0 L}\right)^2 P_{\rm E}
N s h o t ϕ = η P i n h ν 0 , P i n = ( 2 λ 0 L D 2 ) 2 P E
N s h o t l = λ 0 2 π N s h o t ϕ = λ 0 2 L π D 2 h ν 0 η P E \sqrt{N^l_{\rm shot}} = \frac{\lambda_0}{2\pi} \sqrt{N^\phi_{\rm shot}} = \frac{\lambda_0^2 L}{\pi D^2} \sqrt{ \frac{h \nu_0}{\eta P_{\rm E}} }
N s h o t l = 2 π λ 0 N s h o t ϕ = π D 2 λ 0 2 L η P E h ν 0
N s h o t h = 1 L N s h o t l = λ 0 2 π D 2 h ν 0 η P E \sqrt{N^h_{\rm shot}} = \frac{1}{L} \sqrt{N^l_{\rm shot}} = \frac{\lambda_0^2}{\pi D^2}\sqrt{ \frac{h\nu_0}{\eta P_{\rm E}} }
N s h o t h = L 1 N s h o t l = π D 2 λ 0 2 η P E h ν 0
可见散粒噪声贡献的应变噪声水平仅依赖激光发射功率及望远镜直径,与臂长无关。以LISA为例,激光功率2W、臂长250公里,散粒噪声在10 p m / H z \small 10\rm pm/\sqrt{Hz} 1 0 p m / H z 1 0 − 21 / H z \small 10^{-21}/\sqrt{\rm Hz} 1 0 − 2 1 / H z 1 0 − 19 m / H z \small 10^{-19} \rm m/\sqrt{Hz} 1 0 − 1 9 m / H z
N s h o t ϕ = h ν 0 η P i n , P i n = ( D 2 2 λ 0 L ) 2 P E N^\phi_{\rm shot} = \frac{h\nu_0}{\eta P_{\rm in}}, ~~~ P_{\rm in} = \left(\frac{D^2}{2 \lambda_0 L}\right)^2 P_{\rm E}
N s h o t ϕ = η P i n h ν 0 , P i n = ( 2 λ 0 L D 2 ) 2 P E
N s h o t l = λ 0 2 π N s h o t ϕ = λ 0 2 L π D 2 h ν 0 η P E \sqrt{N^l_{\rm shot}} = \frac{\lambda_0}{2\pi} \sqrt{N^\phi_{\rm shot}} = \frac{\lambda_0^2 L}{\pi D^2} \sqrt{ \frac{h \nu_0}{\eta P_{\rm E}} }
N s h o t l = 2 π λ 0 N s h o t ϕ = π D 2 λ 0 2 L η P E h ν 0
N s h o t h = 1 L N s h o t l = λ 0 2 π D 2 h ν 0 η P E \sqrt{N^h_{\rm shot}} = \frac{1}{L} \sqrt{N^l_{\rm shot}} = \frac{\lambda_0^2}{\pi D^2}\sqrt{ \frac{h\nu_0}{\eta P_{\rm E}} }
N s h o t h = L 1 N s h o t l = π D 2 λ 0 2 η P E h ν 0
最后,虽然散粒噪声是白噪声,但考虑到卫星运动等其他因素(?),总的光学测量噪声在低频端并不能达到该极限,仅在高频部分接近白噪声,整体上:
N O M S l = ( 15 p m / H z ) 2 ⋅ [ 1 + ( 2 m H z f ) 4 ] N^l_{\rm OMS} = \left(15 ~ {\rm pm}/\sqrt{\rm Hz}\right)^2 \cdot \left[1+\left(\frac{2 \rm mHz}{f}\right)^4\right]
N O M S l = ( 1 5 p m / H z ) 2 ⋅ [ 1 + ( f 2 m H z ) 4 ]
N O M S h = 1 L N O M S l = 6 × 1 0 − 21 / H z ⋅ 1 + ( 2 m H z f ) 4 \small \sqrt{N^h_{\rm OMS}} = \frac{1}{L} \sqrt{N^l_{\rm OMS}} = 6\times 10^{-21}/\sqrt{\rm Hz} \cdot \sqrt{1+\left(\frac{2 \rm mHz}{f}\right)^4}
N O M S h = L 1 N O M S l = 6 × 1 0 − 2 1 / H z ⋅ 1 + ( f 2 m H z ) 4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 L = 2.5e9 D = 0.3 P = 2 c = 3e8 h = 6.626e-34 eta = 0.07 lambda_0 = 1.064e-6 nu_0 = c/lambda_0 1e-6 /L/2 /np.pi/1e-3 *lambda_0def S_a (f ): """Returns the value of the function S_a(f).""" return (2.4 * 1e-15 )**2 * (1 + (0.4 / f)**2 ) * (1 + (f / 8 )**4 ) f = np.logspace(-2 , 3 , 1000 ) S_a_values = S_a(f) S_h1_root = np.sqrt(S_a_values)/L/(2 *np.pi*f*1e-3 )**2 S_h2_root = 1.5e-11 /L * np.sqrt(1 + (2 /f)**4 ) S_h_root = np.sqrt(S_h1_root**2 + S_h2_root**2 ) plt.plot(f, S_h1_root, '--' , color='grey' ) plt.plot(f, S_h2_root, '--' , color='grey' ) plt.plot(f, S_h_root) plt.xlabel('Frequency (mHz)' , fontsize=12 ) plt.ylabel('S_a (m/s^2/sqrt(Hz))' , fontsize=12 ) plt.xscale('log' ) plt.yscale('log' ) plt.show()
灵敏度曲线
d ( t ) = s ( t ) + n ( t ) , s ( t ) = D a b ( t ) ∗ h a b ( t ) = ∑ P F P ( t ) ∗ h P ( t ) d(t) = s(t) + n(t), ~s(t) = D^{ab}(t)*h_{ab}(t) = \small \sum_P F^P(t)*h_P(t)
d ( t ) = s ( t ) + n ( t ) , s ( t ) = D a b ( t ) ∗ h a b ( t ) = P ∑ F P ( t ) ∗ h P ( t )
变换到频域:
d ~ ( f ) = s ~ ( f ) + n ~ ( f ) = ∑ P F P ( f ) h ~ P ( f ) + n ~ ( f ) \tilde{d}(f) = \tilde{s}(f) + \tilde{n}(f) = \small \sum_P F^P(f) \tilde{h}_P(f) + \tilde{n}(f)
d ~ ( f ) = s ~ ( f ) + n ~ ( f ) = P ∑ F P ( f ) h ~ P ( f ) + n ~ ( f )
对于各向同性无偏振的平稳背景,自相关有
⟨ d ~ ( f ) d ~ ∗ ( f ) ⟩ / T o b s = S h ( f ) ∑ P ∣ F P ( f ) ∣ 2 + N ( f ) = S h ( f ) R ( f ) + N ( f ) \langle\tilde{d}(f)\tilde{d}^*(f)\rangle/T_{\rm obs} = S_h(f) \sum_P |F_P(f)|^2+ N(f) = S_h(f)\mathcal{R}(f) + N(f)
⟨ d ~ ( f ) d ~ ∗ ( f ) ⟩ / T o b s = S h ( f ) P ∑ ∣ F P ( f ) ∣ 2 + N ( f ) = S h ( f ) R ( f ) + N ( f )
在噪声谱已知时,信噪比可表示为:
ρ = 2 ∫ 0 ∞ d f S h ( f ) R ( f ) N ( f ) = ∫ 0 ∞ d f 2 S h ( f ) N ( f ) / R ( f ) \rho = 2 \int_0^\infty df \frac{S_h(f)\mathcal{R}(f)}{N(f)} = \int_0^\infty df \frac{2 S_h(f)}{N(f)/\mathcal{R}(f)}
ρ = 2 ∫ 0 ∞ d f N ( f ) S h ( f ) R ( f ) = ∫ 0 ∞ d f N ( f ) / R ( f ) 2 S h ( f )
这里信噪比公式是错的,量纲不对!!Cornish (2002)以及Maggiore书中似乎是逐个频点的,完全不做积分?!
另一方面,对于并和信号匹配滤波,信噪比公式为:
⟨ ρ 2 ⟩ = 4 ∫ 0 ∞ d f ⟨ ∣ s ~ ( f ) ∣ 2 ⟩ N ( f ) = ∫ 0 ∞ d f 4 ⟨ ∣ h ~ ( f ) ∣ 2 ⟩ N ( f ) / R ( f ) \langle\rho^2\rangle = 4 \int_0^\infty df \frac{\langle|\tilde{s}(f)|^2\rangle}{N(f)} = \int_0^\infty df \frac{4\langle|\tilde{h}(f)|^2\rangle}{N(f)/\mathcal{R}(f)}
⟨ ρ 2 ⟩ = 4 ∫ 0 ∞ d f N ( f ) ⟨ ∣ s ~ ( f ) ∣ 2 ⟩ = ∫ 0 ∞ d f N ( f ) / R ( f ) 4 ⟨ ∣ h ~ ( f ) ∣ 2 ⟩
由以上信噪比公式可看出,N ( f ) / R ( f ) N(f)/\mathcal{R}(f) N ( f ) / R ( f )
上面S h ( f ) S_h(f) S h ( f ) ∣ h ~ ( f ) ∣ 2 |\tilde{h}(f)|^2 ∣ h ~ ( f ) ∣ 2 N ( f ) / R ( f ) N(f)/\mathcal{R}(f) N ( f ) / R ( f )
Babak et al. (2021)定义的灵敏度是N ( f ) / ∣ F P ( f ) ∣ 2 \small N(f)/|F^P(f)|^2 N ( f ) / ∣ F P ( f ) ∣ 2 N ( f ) / ∑ P ∣ F P ( f ) ∣ 2 \small N(f)/\sum_P |F^P(f)|^2 N ( f ) / ∑ P ∣ F P ( f ) ∣ 2 R = ⟨ F + 2 ⟩ = ⟨ F × 2 ⟩ \mathcal{R} = \langle F_+^2\rangle = \langle F_\times^2\rangle R = ⟨ F + 2 ⟩ = ⟨ F × 2 ⟩ 不求和 形式!!
⟨ s ~ ( f ) s ~ ∗ ( f ) ⟩ / T o b s = ⟨ F + 2 ⟩ ⟨ ∣ h ~ × ∣ 2 + ∣ h ~ × ∣ 2 ⟩ = ⟨ ∣ h ~ ∣ 2 ⟩ ⟨ F + 2 + F × 2 ⟩ \langle\tilde{s}(f)\tilde{s}^*(f)\rangle/T_{\rm obs} = \langle F_+^2\rangle \langle|\tilde{h}_\times|^2 + |\tilde{h}_\times|^2\rangle = \langle|\tilde{h}|^2\rangle \langle F_+^2 + F_\times^2\rangle
⟨ s ~ ( f ) s ~ ∗ ( f ) ⟩ / T o b s = ⟨ F + 2 ⟩ ⟨ ∣ h ~ × ∣ 2 + ∣ h ~ × ∣ 2 ⟩ = ⟨ ∣ h ~ ∣ 2 ⟩ ⟨ F + 2 + F × 2 ⟩
臂长制约(Length Penalty):受限于臂长,探测器在高频端的响应逐渐衰降
R ( f ) ≈ 3 10 1 1 + 0.6 ( f / f ∗ ) 2 , f ∗ = c 2 π L \mathcal{R}(f) \approx \frac{3}{10} \frac{1}{1+0.6(f/f_*)^2}, ~~ f_* = \frac{c}{2\pi L}
R ( f ) ≈ 1 0 3 1 + 0 . 6 ( f / f ∗ ) 2 1 , f ∗ = 2 π L c
R ( f ) = 3 10 1 1 + ( f / 25 m H z ) 2 \mathcal{R}(f) = \frac{3}{10} \frac{1}{1+(f/25~\rm mHz)^2}
R ( f ) = 1 0 3 1 + ( f / 2 5 m H z ) 2 1
在长波极限下,LISA相当于2个独立的迈克尔逊干涉仪,在高频端则相当于3个独立的迈克尔逊干涉仪(Robson et al. 2019)
当波长小于4倍臂长(往返光程大于半波长),引力波引入的尺度变化会出现抵消,等于往返光程时完全抵消。理论上,对c 2 L \frac{c}{2L} 2 L c
低频的加速度噪声所引入的臂长变化与臂长长度无关,对应于应变噪声δ L a c c L ∝ 1 L \frac{\delta L_{\rm acc}}{L} \propto \frac{1}{L} L δ L a c c ∝ L 1 c 2 L ∝ 1 L \frac{c}{2L} \propto \frac{1}{L} 2 L c ∝ L 1
原文说的是c 4 L \frac{c}{4L} 4 L c
除了白噪声,对于一般的随机信号,不同时间尺度(频率)上的波动程度是不同的,
引力波引入的臂长差所对应的光程差会随着引力波往返传播积累,最终反映在测得的相位差上。尤其是考虑空间引力波TDI,光程会随TDI代数增加而增加。用分数频移表示数据时,响应同样会随光程积累。转换为应变量时,文献中存在不同约定:
用光程约化 δ ℓ ℓ \frac{\delta\ell}{\ell} ℓ δ ℓ
用臂长约化 δ ℓ L \frac{\delta\ell}{L} L δ ℓ
这里问题的本质在于应变本身是强度量,而非广延量,不具有可加性。响应分析中通常是计算光程差(相位差)的累积,再转换为应变,而转换时存在两种选择。对于空间中更常用的分数频移,本身具有可加性,没有这里的问题。第一种约定,最符合应变量的物理含义,反映了其强度量的性质,不随光程累积;第二种约定则是将应变量作为广延量处理,体现了实际测量信号会随光程积累。两种约定本身都可行,但噪声功率谱定义需要与约定自洽 ,文献中有不少误用。比如Cornish 2002 中响应部分是按 1 / 2 L 1/2L 1 / 2 L 1 / L 1/L 1 / L 之前文章 用的 1 / 2 L 1/2L 1 / 2 L
空间引力波探测中各激光链路均含噪声,每个链路涉及2个加速度噪声、1个光学测量噪声。考虑TDI时,随光程增加,涉及的噪声数量随之增加,总噪声水平需考虑噪声间的“相关性” :独立噪声是功率相加,而相关噪声是幅值相加(考虑必要的时间或相位延迟)。换句话说,类似于信号的响应传递,各项噪声的贡献也需要考虑对应的噪声传递函数 ,具体可参考早期Larson、Prince等人的LISA灵敏度文章,最新的可参考该论文 。此外,转换为应变量时还要按前面的约定,统一用臂长或光程约化。
最常见的假设是,每个测试质量和干涉测量的噪声独立,但功率谱相同。在这种假设下,简单迈克尔逊干涉(0代TDI)包含4个独立的光学测量噪声,4个独立的加速度噪声,而每个加速度噪声需计入2遍,且其中两个相错往返光程的时间延迟。因此最终功率谱密度为(以臂长差记):
N l ( f ) = 4 × S s h o t l ( f ) + 2 2 × S a c c l ( f ) + ( 1 + Δ 2 L ) ( 1 + Δ 2 L ) ∗ S a c c l ( f ) = 4 × [ S s h o t l ( f ) + 2 ( 1 + cos 2 f f ∗ ) S a c c l ( f ) ] \begin{aligned}
N^l(f) &= 4 \times S^l_{\rm shot}(f) + 2^2\times S^l_{\rm acc}(f) + (1+\Delta_{2L})(1+\Delta_{2L})^*S^l_{\rm acc}(f)\\
&= 4 \times \left[S^l_{\rm shot}(f) + 2\left(1+\cos^2{ \textstyle \frac{f}{f_*}}\right)S^l_{\rm acc}(f)\right]
\end{aligned} N l ( f ) = 4 × S s h o t l ( f ) + 2 2 × S a c c l ( f ) + ( 1 + Δ 2 L ) ( 1 + Δ 2 L ) ∗ S a c c l ( f ) = 4 × [ S s h o t l ( f ) + 2 ( 1 + cos 2 f ∗ f ) S a c c l ( f ) ]
这里 Δ 2 L = e − i ω 2 L / c \Delta_{2L}=e^{-i\omega 2L/c} Δ 2 L = e − i ω 2 L / c Δ 2 L = 1 \Delta_{2L}=1 Δ 2 L = 1 4 [ S s h o t l ( f ) + 4 S a c c l ( f ) ] 4 [S^l_{\rm shot}(f) + 4S^l_{\rm acc}(f)] 4 [ S s h o t l ( f ) + 4 S a c c l ( f ) ]
N h ( f ) = S s h o t h ( f ) + 2 ( 1 + cos 2 f f ∗ ) S a c c h ( f ) N^h(f) = S^h_{\rm shot}(f) + 2\left(1+\cos^2{ \textstyle \frac{f}{f_*}}\right)S^h_{\rm acc}(f)
N h ( f ) = S s h o t h ( f ) + 2 ( 1 + cos 2 f ∗ f ) S a c c h ( f )
高阶TDI时,涉及的噪声均与之前噪声相关,可以用与信号类似的时间延迟因子,但注意用光程约化 和 用臂长约化或分数频移,对应的延迟因子不同。如果在迈克尔逊情况下用光程 2 L 2L 2 L δ ℓ 2 L \frac{\delta\ell}{2L} 2 L δ ℓ
对于分数频移,TDI1/TDI0、TDI2/TDI1 信号响应的因子分别为:
W 1 y = 1 − e − i ω 2 L / c , W 2 y = 1 − e − i ω 4 L / c W^y_1 = 1 - e^{-i\omega 2L/c} , ~~~ W^y_2 = 1 - e^{-i\omega 4L/c}
W 1 y = 1 − e − i ω 2 L / c , W 2 y = 1 − e − i ω 4 L / c
对于光程约化的应变量,对应因子仅为上述1/2,最终功率响应或功率谱密度的因子为:
∣ W 1 h ∣ 2 = sin 2 ( ω L / c ) , ∣ W 2 h ∣ 2 = sin 2 ( ω 2 L / c ) |W^h_1|^2 = \sin^2(\omega L/c) , ~~~ |W^h_2|^2 = \sin^2(\omega 2L/c)
∣ W 1 h ∣ 2 = sin 2 ( ω L / c ) , ∣ W 2 h ∣ 2 = sin 2 ( ω 2 L / c )
S n ( f ) ≡ N ( f ) R ( f ) S_n(f) \equiv \frac{N(f)}{\mathcal{R}(f)}
S n ( f ) ≡ R ( f ) N ( f )
The LISA sensitivity averaged over one year, and over all directions of propagation and polarization, and for SNR = 5.
噪声转移函数/响应函数 (Larson et al. 2002; Larson 2005 LISA: A Modern Astrophysical Observatory)
地基引力波观测中是除掉了转移函数的!!??
张量的转移函数 v.s. 投影后标量的转移函数