https://en.wikipedia.org/wiki/Signal_processing
光的色散对应信号的傅里叶分析,光谱对应信号频谱
衍射条纹光强对应的是孔径函数傅里叶变换的幅值
Signal Recovery with Differentiable Scalograms and Spectrograms
Measure Power of Deterministic Periodic Signals
Practical Statistics for Astronomers 第8章https://pysdr.org/content/frequency_domain.html
傅里叶变换及其应用学习笔记 - TaigaComplex 离散时间信号处理学习笔记 - TaigaComplex 随机过程学习笔记 - TaigaComplex 卡尔曼滤波器详解——从零开始 Spectrum and spectral density estimation by DFT Signals, Sampling, & Filtering - Scientific Computing
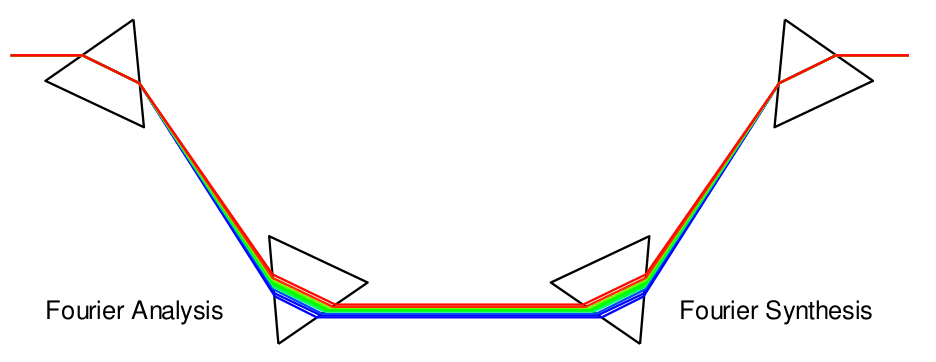
傅里叶分析与合成
傅里叶变换 FT
傅里叶分析最初是研究周期性现象,对于周期函数,利用傅里叶级数 (Fourier Series),可将其展开为离散频率(谐频)三角函数的无限求和,展开系数由函数的单个周期决定。
x ( t ) = ∑ k = − ∞ ∞ α k e i 2 π k T t , α k = 1 T ∫ − T / 2 T / 2 x ( t ) e − i 2 π k T t d t x(t) = \sum_{k=-\infty}^{\infty} \alpha_k e^{i \frac{2\pi k}{T} t}, ~~~ \alpha_k = \frac{1}{T}\int_{-T/2}^{T/2} x(t) e^{-i \frac{2\pi k}{T} t} dt
x ( t ) = k = − ∞ ∑ ∞ α k e i T 2 π k t , α k = T 1 ∫ − T / 2 T / 2 x ( t ) e − i T 2 π k t d t
这里三角函数使用了复数形式(欧拉公式),为得到实信号,系数a k a_k a k
对于非周期函数,可将其视为周期∞ \infty ∞ T → ∞ T\rightarrow \infty T → ∞ α k → 0 \alpha_k \rightarrow 0 α k → 0 x ( t ) ∈ L 1 ( R ) x(t)\in L^1(\R) x ( t ) ∈ L 1 ( R )
β k = ∫ − T / 2 T / 2 x ( t ) e − i 2 π k T t d t , x ( t ) = 1 T ∑ − ∞ ∞ β k e i 2 π k T t \beta_k = \int_{-T/2}^{T/2} x(t) e^{-i \frac{2\pi k}{T} t} dt, ~~~ x(t) = \frac{1}{T} \sum_{-\infty}^{\infty} \beta_k e^{i \frac{2\pi k}{T} t}
β k = ∫ − T / 2 T / 2 x ( t ) e − i T 2 π k t d t , x ( t ) = T 1 − ∞ ∑ ∞ β k e i T 2 π k t
当T → ∞ , 1 T → 0 T\rightarrow \infty, \frac{1}{T}\rightarrow 0 T → ∞ , T 1 → 0 k T \frac{k}{T} T k f = k T , d f = 1 T f=\frac{k}{T}, df=\frac{1}{T} f = T k , d f = T 1
X ( f ) = ∫ x ( t ) e − i 2 π f t d t , x ( t ) = ∫ X ( f ) e i 2 π f t d f \boxed{X(f) = \int x(t) e^{-i 2\pi f t} dt, ~~~ x(t) = \int X(f) e^{i 2\pi f t} df}
X ( f ) = ∫ x ( t ) e − i 2 π f t d t , x ( t ) = ∫ X ( f ) e i 2 π f t d f
这就是傅里叶变换 (Fourier Transform)。f f f ω = 2 π f \omega=2\pi f ω = 2 π f
X ( ω ) = ∫ x ( t ) e − i ω t d t , x ( t ) = 1 2 π ∫ X ( ω ) e i ω t d ω X(\omega) = \int x(t) e^{-i\omega t} dt, ~~~ x(t) = \frac{1}{2\pi} \int X(\omega) e^{i \omega t} d\omega
X ( ω ) = ∫ x ( t ) e − i ω t d t , x ( t ) = 2 π 1 ∫ X ( ω ) e i ω t d ω
注意这里正逆变换的对称性被破坏,因此又有另一种定义形式:
X ( ω ) = 1 2 π ∫ x ( t ) e − i ω t d t , x ( t ) = 1 2 π ∫ X ( ω ) e i ω t d ω X(\omega) = \frac{1}{\sqrt{2\pi}} \int x(t) e^{-i\omega t} dt, ~~~ x(t) = \frac{1}{\sqrt{2\pi}} \int X(\omega) e^{i \omega t} d\omega
X ( ω ) = 2 π 1 ∫ x ( t ) e − i ω t d t , x ( t ) = 2 π 1 ∫ X ( ω ) e i ω t d ω
注:这里符号上未做区分,但显然上面三种定义下的X X X
分布的傅里叶变换sin , cos \sin, \cos sin , cos δ ( x ) \delta(x) δ ( x ) δ \delta δ sin , cos , x n \sin, \cos, x^n sin , cos , x n δ \delta δ
不确定性原理δ \delta δ 直观看待不确定性原理:不只是量子现象 ∫ − ∞ ∞ t 2 ∣ x ( t ) ∣ 2 d t \int_{-\infty}^{\infty} t^2|x(t)|^2 dt ∫ − ∞ ∞ t 2 ∣ x ( t ) ∣ 2 d t ∫ − ∞ ∞ t 2 ∣ x ( t ) ∣ 2 d t ∫ − ∞ ∞ ∣ x ( t ) ∣ 2 d t \frac{\int_{-\infty}^{\infty} t^2|x(t)|^2 dt}{\int_{-\infty}^{\infty} |x(t)|^2 dt} ∫ − ∞ ∞ ∣ x ( t ) ∣ 2 d t ∫ − ∞ ∞ t 2 ∣ x ( t ) ∣ 2 d t Δ x \Delta_x Δ x x ( t ) x(t) x ( t ) Δ X \Delta_X Δ X X ( f ) X(f) X ( f ) Δ x Δ X ≥ 1 16 π 2 \Delta_x\Delta_X \ge \frac{1}{16\pi^2} Δ x Δ X ≥ 1 6 π 2 1
上面FT变换为L 1 ( R ) L^{1}(\R) L 1 ( R ) R \R R t t t f = 1 / T f=1/T f = 1 / T k = 1 / λ k=1/\lambda k = 1 / λ t / 2 π t/2\pi t / 2 π ω = 2 π f \omega = 2\pi f ω = 2 π f p = h k p=hk p = h k ∈ R n \in\R^n ∈ R n L 1 ( R n ) L^{1}(\R^n) L 1 ( R n )
X ( ω ) X(\omega) X ( ω ) X ( ω ) = ∣ X ( ω ) ∣ e i ϕ ( ω ) X(\omega) = |X(\omega)|e^{i\phi(\omega)} X ( ω ) = ∣ X ( ω ) ∣ e i ϕ ( ω ) ∣ X ( ω ) ∣ |X(\omega)| ∣ X ( ω ) ∣ ϕ ( ω ) \phi(\omega) ϕ ( ω ) X ( − ω ) = X ( ω ) ‾ \boxed{X(-\omega) = \overline{X(\omega)}} X ( − ω ) = X ( ω ) 负频率信息是不必要的 。从频谱角度看,实信号幅度谱为偶函数,相位谱为奇函数;而从变换角度看,X ( ω ) X(\omega) X ( ω )
x ( t ) = ∫ − ∞ ∞ X ( f ) e i 2 π f t d f = ∫ − ∞ ∞ R e ( X ( f ) e i 2 π f t ) d f \displaystyle x(t) = \int_{-\infty}^{\infty} X(f) e^{i 2\pi f t} df = \int_{-\infty}^{\infty} \mathrm{Re} \left( X(f) e^{i 2\pi f t} \right) df
x ( t ) = ∫ − ∞ ∞ X ( f ) e i 2 π f t d f = ∫ − ∞ ∞ R e ( X ( f ) e i 2 π f t ) d f
以F \mathcal{F} F F − 1 \mathcal{F}^{-1} F − 1
常见变换:1 , e i t , e − π t 2 , r e c t ( t ) , t r i ( t ) 1, ~ e^{it}, ~ e^{-\pi t^2}, ~ {\rm rect}(t), ~ {\rm tri}(t) 1 , e i t , e − π t 2 , r e c t ( t ) , t r i ( t ) 1 ↔ δ ( t ) , e i t ↔ δ ( f − 1 2 π ) , e − π t 2 ↔ e − π f 2 1 \leftrightarrow \delta(t), ~~~~ e^{it} \leftrightarrow \delta(f-\frac{1}{2\pi}), ~~~~ e^{-\pi t^2} \leftrightarrow e^{-\pi f^2}
1 ↔ δ ( t ) , e i t ↔ δ ( f − 2 π 1 ) , e − π t 2 ↔ e − π f 2
r e c t ( f ) ↔ s i n c ( f ) , t r i ( t ) ↔ s i n c 2 ( f ) {\rm rect}(f) \leftrightarrow {\rm sinc}(f), ~~~~~~ {\rm tri}(t) \leftrightarrow {\rm sinc}^2(f)
r e c t ( f ) ↔ s i n c ( f ) , t r i ( t ) ↔ s i n c 2 ( f )
其中值得注意的,高斯函数的FT还是高斯函数,对应于傅里叶变换这个线性算子的本征函数,当然不限于高斯函数 ,任何f f f f + F f + F 2 f + F 3 f f+\mathcal{F}f+\mathcal{F}^2f+\mathcal{F}^3f f + F f + F 2 f + F 3 f
线性F { f + g } = F { f } + F { g } , F { a f } = a F { f } \mathcal{F}\{f + g\} = \mathcal{F}\{f\} + \mathcal{F}\{g\}, ~~~ \mathcal{F}\{a f\} = a\mathcal{F}\{f\}
F { f + g } = F { f } + F { g } , F { a f } = a F { f }
前者为可加性,后者为齐次性,两者共同构成叠加原理,是线性系统的核心特征。
平移
F { x ( t − t 0 ) } = e − i ω t 0 X ( ω ) = ∣ X ( ω ) ∣ e i [ θ ( ω ) − ω t 0 ] \mathcal{F}\{x(t-t_0)\} = e^{-i\omega t_0}X(\omega) = |X(\omega)|e^{i[\theta(\omega)-\omega t_0]}
F { x ( t − t 0 ) } = e − i ω t 0 X ( ω ) = ∣ X ( ω ) ∣ e i [ θ ( ω ) − ω t 0 ]
时域的时移对应频域的相移
F { x ( t ) e i ω 0 t } = X ( ω − ω 0 ) \mathcal{F}\left\{x(t)e^{i\omega_0 t}\right\} = X(\omega-\omega_0)
F { x ( t ) e i ω 0 t } = X ( ω − ω 0 )
时域的频移 (幅度调制)对应频域的平移 F { x ( t ) cos ( ω 0 t ) } = 1 2 [ X ( ω − ω 0 ) + X ( ω + ω 0 ) ] \mathcal{F}\left\{x(t)\cos(\omega_0 t)\right\} = {\displaystyle\frac{1}{2}} [X(\omega-\omega_0) + X(\omega+\omega_0)] F { x ( t ) cos ( ω 0 t ) } = 2 1 [ X ( ω − ω 0 ) + X ( ω + ω 0 ) ]
缩放F { x ( a t ) } = 1 ∣ a ∣ X ( ω a ) \mathcal{F}\{x(at)\} = \frac{1}{|a|} X\left(\frac{\omega}{a}\right)
F { x ( a t ) } = ∣ a ∣ 1 X ( a ω )
时频域缩放对偶:时域横向压缩,频域横向展宽(同时纵向压低),时域横向展宽,频域横向压缩(同时纵向提升)。时域与频域的定域性不可兼得(不确定性原理)。
反转F { x ( − t ) } = F − 1 { x ( t ) } = X ( − ω ) \mathcal{F}\{x(-t)\} = \mathcal{F}^{-1}\{x(t)\} = X(-\omega)
F { x ( − t ) } = F − 1 { x ( t ) } = X ( − ω )
函数反转的FT = 函数傅里叶逆变换IFT = 函数FT后反转(时间反转对应频率反转)x ( t ) x(t) x ( t ) X ( − ω ) = X ( ω ) ‾ X(-\omega)=\overline{X(\omega)} X ( − ω ) = X ( ω ) F { x ( − t ) } = X ( ω ) ‾ \mathcal{F}\{x(-t)\} = \overline{X(\omega)} F { x ( − t ) } = X ( ω )
共轭F { x ( t ) ‾ } = F { x ( − t ) } ‾ = X ( − ω ) ‾ \mathcal{F}\left\{\overline{x(t)}\right\} = \overline{\mathcal{F}\left\{x(-t)\right\}} = \overline{X(-\omega)}
F { x ( t ) } = F { x ( − t ) } = X ( − ω )
周期性/对偶性F F { x ( t ) } = F F − 1 { x ( − t ) } = x ( − t ) \mathcal{F}\mathcal{F}\{x(t)\} = \mathcal{F}\mathcal{F}^{-1}\{x(-t)\} = x(-t)
F F { x ( t ) } = F F − 1 { x ( − t ) } = x ( − t )
两次FT对应时间反转,四次FT才回到原信号,FT可视为时频平面上的90°旋转,并可进一步推广到任意角度旋转的分数FT。对于(实)对称函数,两次FT即可回到原信号。
卷积定理F { f ∗ g } = F { f } F { g } \mathcal{F}\{f*g\} = \mathcal{F}\{f\} \mathcal{F}\{g\}
F { f ∗ g } = F { f } F { g }
信号卷积的FT = 信号FT后相乘;信号相乘的FT = 信号FT后卷积F { f g } = F { f } ∗ F { g } \mathcal{F}\{f g\} = \mathcal{F}\{f\} * \mathcal{F}\{g\}
F { f g } = F { f } ∗ F { g }
注:后者只针对普通频率f f f 1 2 π \frac{1}{2\pi} 2 π 1
相关定理:F { f ⋆ g } = F { f } ‾ F { g } \mathcal{F}\{f \star g\} = \overline{\mathcal{F}\{f\}} \mathcal{F}\{g\}
F { f ⋆ g } = F { f } F { g }
信号相关的FT = 信号FT取共轭后相乘,相比卷积多了后者多了共轭。在自相关情况下即为维纳-辛钦定理:平稳信号的功率谱密度是其自相关函数的傅立叶变换。F { f ⋆ f } = ∣ F { f } ∣ 2 \mathcal{F}\{f \star f\} = |\mathcal{F}\{f\}|^2
F { f ⋆ f } = ∣ F { f } ∣ 2
帕塞瓦尔(Parseval)定理:∫ f ( t ) g ( t ) ‾ d t = ∫ F ( f ) G ( f ) ‾ d f \displaystyle \int f(t)\overline{g(t)} dt = \int F(f)\overline{G(f)} df
∫ f ( t ) g ( t ) d t = ∫ F ( f ) G ( f ) d f
∫ ∣ x ( t ) ∣ 2 d t = ∫ ∣ X ( f ) ∣ 2 d f \displaystyle \int |x(t)|^2 dt = \int |X(f)|^2 df
∫ ∣ x ( t ) ∣ 2 d t = ∫ ∣ X ( f ) ∣ 2 d f
能量守恒
泊松求和公式:∑ n x ( n ) = ∑ k X ( k ) \sum_n x(n) = \sum_k X(k)
n ∑ x ( n ) = k ∑ X ( k )
将普通函数的离散求和变为其傅里叶变换的离散和。f ( t ) = ∑ n x ( t + n ) f(t) = \sum_n x(t+n) f ( t ) = ∑ n x ( t + n ) x ( t ) x(t) x ( t ) f ( t ) f(t) f ( t ) α k = ∫ 0 1 f ( t ) e − i 2 π k t d t = ∫ 0 1 ∑ n x ( t + n ) e − i 2 π k t d t = ∑ n e i 2 π k n ∫ n n + 1 x ( t ) e − i 2 π k t d t = ∫ x ( t ) e − i 2 π k t d t = X ( k ) \begin{aligned}
\alpha_k &= \int_0^1 f(t) e^{-i 2\pi k t} dt = \int_0^1 \sum_n x(t+n) e^{-i 2\pi k t} dt\\
&= \sum_n e^{i 2\pi k n} \int_n^{n+1} x(t) e^{-i 2\pi k t} dt \\
&= \int x(t) e^{-i 2\pi k t} dt = X(k)
\end{aligned} α k = ∫ 0 1 f ( t ) e − i 2 π k t d t = ∫ 0 1 n ∑ x ( t + n ) e − i 2 π k t d t = n ∑ e i 2 π k n ∫ n n + 1 x ( t ) e − i 2 π k t d t = ∫ x ( t ) e − i 2 π k t d t = X ( k )
f ( t ) = ∑ n x ( t + n ) = ∑ k α k e i 2 π k t = ∑ k X ( k ) e i 2 π k t f(t) = \sum_n x(t+n) = \sum_k \alpha_k e^{i 2\pi k t} = \sum_k X(k) e^{i 2\pi k t} f ( t ) = ∑ n x ( t + n ) = ∑ k α k e i 2 π k t = ∑ k X ( k ) e i 2 π k t t = 0 t=0 t = 0 f ( t ) f(t) f ( t ) f ( t ) f(t) f ( t ) x ( t ) x(t) x ( t )
导数定理:F { x ′ ( t ) } = i ω X ( ω ) \mathcal{F}\{x'(t)\} = i\omega X(\omega)
F { x ′ ( t ) } = i ω X ( ω )
F { x ( n ) ( t ) } = ( i ω ) n X ( ω ) \mathcal{F}\left\{x^{(n)}(t)\right\} = (i\omega)^n X(\omega)
F { x ( n ) ( t ) } = ( i ω ) n X ( ω )
积分:F { ∫ − ∞ t x ( τ ) d τ } = 1 i ω X ( ω ) + π X ( 0 ) δ ( ω ) \mathcal{F}\left\{\int_{-\infty}^t x(\tau) d\tau \right\} = \frac{1}{i\omega} X(\omega) + \pi X(0) \delta(\omega)
F { ∫ − ∞ t x ( τ ) d τ } = i ω 1 X ( ω ) + π X ( 0 ) δ ( ω )
在高维空间傅里叶变换定义变为矢量形式∫ R n f ( x ) e − i 2 π k ⋅ x d x \int_{\R^n} f(\bm{x})e^{-i2\pi \bm{k} \cdot \bm{x} } d\bm{x} ∫ R n f ( x ) e − i 2 π k ⋅ x d x
离散时间变换 DTFT
从傅里叶变换角度看傅里叶级数,相当于是以1 / T s 1/T_s 1 / T s
x ( t ) = ∫ X ( f ) e i 2 π f t d f → f = k / T s ∑ − ∞ ∞ 1 T s X ( k / T s ) e i 2 π k T s t = ∑ − ∞ ∞ α k e i 2 π k T s t x(t) = \int X(f) e^{i 2\pi f t} df \xrightarrow{f=k/T_s} \sum_{-\infty}^{\infty} \frac{1}{T_s}X(k/T_s) e^{i \frac{2\pi k}{T_s} t} = \sum_{-\infty}^{\infty} \alpha_k e^{i \frac{2\pi k}{T_s} t}
x ( t ) = ∫ X ( f ) e i 2 π f t d f f = k / T s − ∞ ∑ ∞ T s 1 X ( k / T s ) e i T s 2 π k t = − ∞ ∑ ∞ α k e i T s 2 π k t
其展开系数:
α k = 1 T s X ( k / T s ) = 1 T s ∫ T s x ( t ) e − i 2 π k T s t d t \alpha_k = \frac{1}{T_s}X(k/T_s) = \frac{1}{T_s}\int_{T_s} x(t) e^{-i \frac{2\pi k}{T_s} t} dt
α k = T s 1 X ( k / T s ) = T s 1 ∫ T s x ( t ) e − i T s 2 π k t d t
与之相对的,以T s T_s T s
X ( f ) = ∫ x ( t ) e − i 2 π f t d t → t = n T s ∑ − ∞ ∞ T s x ( n T s ) e − i 2 π f n T s = ∑ − ∞ ∞ x [ n ] e − i 2 π f n T s X(f) = \int x(t) e^{-i 2\pi f t} dt \xrightarrow{t=nT_s} \sum_{-\infty}^{\infty} T_s x(nT_s) e^{-i 2\pi f ~ nT_s} = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi f ~ nT_s}
X ( f ) = ∫ x ( t ) e − i 2 π f t d t t = n T s − ∞ ∑ ∞ T s x ( n T s ) e − i 2 π f n T s = − ∞ ∑ ∞ x [ n ] e − i 2 π f n T s
最终对于离散时间变换DTFT有:
X 1 T s ( f ) = ∑ − ∞ ∞ x [ n ] e − i 2 π f n T s , x [ n ] = T s x ( n T s ) = T s ∫ 1 T s X 1 T s ( f ) e i 2 π f n T s d f \boxed{X_{\frac{1}{T_s}}(f) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi f ~ nT_s}, ~~~ x[n] = T_sx(nT_s) = T_s\int_{\frac{1}{T_s}} X_{\frac{1}{T_s}}(f) e^{i 2\pi f n T_s} df}
X T s 1 ( f ) = − ∞ ∑ ∞ x [ n ] e − i 2 π f n T s , x [ n ] = T s x ( n T s ) = T s ∫ T s 1 X T s 1 ( f ) e i 2 π f n T s d f
另一种常见的定义方式是:
X 1 T s ( f ) = ∑ − ∞ ∞ x n e − i 2 π f n T s , x n = x ( n T s ) = T s ∫ 1 T s X 1 T s ( f ) e i 2 π f n T s d f \boxed{X_{\frac{1}{T_s}}(f) = \sum_{-\infty}^{\infty} x_n e^{-i 2\pi f ~ nT_s}, ~~~ x_n = x(nT_s) = T_s \int_{\frac{1}{T_s}} X_{\frac{1}{T_s}}(f) e^{i 2\pi f n T_s} df}
X T s 1 ( f ) = − ∞ ∑ ∞ x n e − i 2 π f n T s , x n = x ( n T s ) = T s ∫ T s 1 X T s 1 ( f ) e i 2 π f n T s d f
两种定义形式上完全一致,区别在于x [ n ] x[n] x [ n ] x n x_n x n f s = 1 T s f_s = \frac{1}{T_s} f s = T s 1 f / f s f/f_s f / f s n T s / T s nT_s/T_s n T s / T s π \pi π
X 1 ( f ) = ∑ − ∞ ∞ x [ n ] e − i 2 π f n , x [ n ] = ∫ 1 X 1 ( f ) e i 2 π f n d f X_1 (f) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi f n}, ~~~ x[n] = \int_1 X_1(f) e^{i 2\pi f n} df
X 1 ( f ) = − ∞ ∑ ∞ x [ n ] e − i 2 π f n , x [ n ] = ∫ 1 X 1 ( f ) e i 2 π f n d f
X 2 π ( ω ) = ∑ − ∞ ∞ x [ n ] e − i ω n , x [ n ] = 1 2 π ∫ 2 π X 2 π ( ω ) e i ω n d ω X_{2\pi}(\omega) = \sum_{-\infty}^{\infty} x[n] e^{-i \omega n}, ~~~ x[n] = \frac{1}{2\pi}\int_{2\pi} X_{2\pi}(\omega) e^{i \omega n} d\omega
X 2 π ( ω ) = − ∞ ∑ ∞ x [ n ] e − i ω n , x [ n ] = 2 π 1 ∫ 2 π X 2 π ( ω ) e i ω n d ω
DTFT的周期性
X 1 T s ( f ) = ∑ n = − ∞ ∞ T s x ( n T s ) e − i 2 π f n T s = ∑ k = − ∞ ∞ X ( f − k T s ) X_{\frac{1}{T_s}}(f) = \sum_{n=-\infty}^{\infty} T_s x(nT_s) e^{-i 2\pi f ~ nT_s} = \sum_{k=-\infty}^{\infty} X(f-\frac{k}{T_s})
X T s 1 ( f ) = n = − ∞ ∑ ∞ T s x ( n T s ) e − i 2 π f n T s = k = − ∞ ∑ ∞ X ( f − T s k )
上式表明,对x ( t ) x(t) x ( t ) X 1 T s ( f ) X_{\frac{1}{T_s}}(f) X T s 1 ( f ) X ( f ) X(f) X ( f ) 1 T s \frac{1}{T_s} T s 1 X ( f ) X(f) X ( f ) 1 T s \frac{1}{T_s} T s 1 1 T s \frac{1}{T_s} T s 1 x ( t ) x(t) x ( t ) 1 T s \frac{1}{T_s} T s 1 混叠(aliasing) 。采样率的选择(Nyquist采样率)对于减轻混叠效应很重要,此外通常会在信号采样前 使用低通滤波抑制高频成分(采样后混叠就去不掉了)。
傅里叶级数是周期性函数的频域分解,时域具有周期性,频域中离散;DTFT可视为傅里叶级数的频域对偶,在时域离散,频域为周期性。下图展示了傅里叶变换(左上)、傅里叶级数(右上)、连续时间傅里叶变换(左下)及离散傅里叶变换(右下)。图中左下可看到采样后,连续信号频谱的高频被混入低频区间,并周期性延拓。
抽取(Decimation):y [ n ] = x [ n M ] y[n] = x[nM] y [ n ] = x [ n M ] 1 T s \frac{1}{T_s} T s 1 1 M T s \frac{1}{MT_s} M T s 1 x [ n M ] ↔ 1 M ∑ 0 M − 1 X 1 T s ( f − m M ) x[nM] \leftrightarrow \frac{1}{M} \sum_0^{M-1} X_{\frac{1}{T_s}}\left(\frac{f-m}{M}\right)
x [ n M ] ↔ M 1 0 ∑ M − 1 X T s 1 ( M f − m )
补零:当n/M为整数y [ n ] = x [ n / M ] y[n] = x[n/M] y [ n ] = x [ n / M ] y [ n ] = 0 y[n] =0 y [ n ] = 0 M − 1 M-1 M − 1 y [ n ] ↔ X 1 T s ( M f ) y[n] \leftrightarrow X_{\frac{1}{T_s}}\left(Mf\right)
y [ n ] ↔ X T s 1 ( M f )
周期性数据 N N N f = k N T s f=\frac{k}{NT_s} f = N T s k 1 T s / 1 N T s = N \frac{1}{T_s}/\frac{1}{NT_s} = N T s 1 / N T s 1 = N
X 1 T s ( f ) = ∑ − ∞ ∞ x [ n ] e − i 2 π f n T s → f = k / N T s ∑ − ∞ ∞ x [ n ] e − i 2 π k N T s n T s = ∑ − ∞ ∞ x [ n ] e − i 2 π k N n X_{\frac{1}{T_s}}(f) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi f ~ nT_s} \xrightarrow{f=k/NT_s} \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi \frac{k}{NT_s} ~ nT_s} = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi \frac{k}{N} n}
X T s 1 ( f ) = − ∞ ∑ ∞ x [ n ] e − i 2 π f n T s f = k / N T s − ∞ ∑ ∞ x [ n ] e − i 2 π N T s k n T s = − ∞ ∑ ∞ x [ n ] e − i 2 π N k n
x [ n ] x[n] x [ n ] e − i 2 π k N n e^{-i 2\pi \frac{k}{N} n} e − i 2 π N k n N N N x n = x ( n T s ) = 1 T s x [ n ] x_n=x(nT_s)=\frac{1}{T_s}x[n] x n = x ( n T s ) = T s 1 x [ n ] X k X_k X k
X k = ∑ n = 0 N − 1 x n e − i 2 π k N n X_k = \sum_{n=0}^{N-1} x_n e^{-i 2\pi \frac{k}{N} n}
X k = n = 0 ∑ N − 1 x n e − i 2 π N k n
X [ k ] = X 1 T s ( k N T s ) = ∑ n ′ = − ∞ ∞ T s X k = T s X k δ ( k − f N T s ) X[k] = X_{\frac{1}{T_s}}\left(\frac{k}{NT_s}\right) = \sum_{n'=-\infty}^{\infty} T_s X_k = T_s X_k~\delta(k - fNT_s)
X [ k ] = X T s 1 ( N T s k ) = n ′ = − ∞ ∑ ∞ T s X k = T s X k δ ( k − f N T s )
X 1 T s ( f ) = ∑ k = − ∞ ∞ X [ k ] = 1 N ∑ k = − ∞ ∞ X k δ ( f − k N T s ) X_{\frac{1}{T_s}}(f) = \sum_{k=-\infty}^{\infty} X[k] = \frac{1}{N} \sum_{k=-\infty}^{\infty} X_k ~\delta(f-\frac{k}{NT_s})
X T s 1 ( f ) = k = − ∞ ∑ ∞ X [ k ] = N 1 k = − ∞ ∑ ∞ X k δ ( f − N T s k )
对应的逆变换:
x n = 1 T s x [ n ] = ∫ 1 T s X 1 T s ( f ) e i 2 π f n T s d f = 1 N ∑ k = 0 N − 1 X k e i 2 π k N n x_n = \frac{1}{T_s} x[n] = \int_{\frac{1}{T_s}} X_{\frac{1}{T_s}}(f) e^{i 2\pi f n T_s} df = \frac{1}{N} \sum_{k=0}^{N-1} X_k e^{i 2\pi \frac{k}{N} n}
x n = T s 1 x [ n ] = ∫ T s 1 X T s 1 ( f ) e i 2 π f n T s d f = N 1 k = 0 ∑ N − 1 X k e i 2 π N k n
最终:
X k = ∑ n = 0 N − 1 x n e − i 2 π k N n , x n = 1 N ∑ k = 0 N − 1 X k e i 2 π k N n X_k = \sum_{n=0}^{N-1} x_n e^{-i 2\pi \frac{k}{N} n}, ~~~ x_n = \frac{1}{N} \sum_{k=0}^{N-1} X_k e^{i 2\pi \frac{k}{N} n}
X k = n = 0 ∑ N − 1 x n e − i 2 π N k n , x n = N 1 k = 0 ∑ N − 1 X k e i 2 π N k n
注意,这里离散变换与连续傅里叶值在取值上关系为X k = X ( f ) T s = X ( f ) f s X_k = \frac{X(f)}{T_s} = X(f)f_s X k = T s X ( f ) = X ( f ) f s
一般数据 X 1 T s ( f ) X_{\frac{1}{T_s}}(f) X T s 1 ( f ) N N N
X N [ k ] = X 1 T s ( k N T s ) = ∑ − ∞ ∞ x [ n ] e − i 2 π k N n X_N[k] = X_{\frac{1}{T_s}}\left(\frac{k}{NT_s}\right) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi \frac{k}{N} n}
X N [ k ] = X T s 1 ( N T s k ) = − ∞ ∑ ∞ x [ n ] e − i 2 π N k n
由于e − i 2 π k N n e^{-i 2\pi \frac{k}{N} n} e − i 2 π N k n N N N
X N [ k ] = ∑ m = − ∞ ∞ ∑ n = 0 N − 1 x [ n − m N ] e − i 2 π k N n = ∑ n = 0 N − 1 ∑ m = − ∞ ∞ x [ n − m N ] e − i 2 π k N n = ∑ n = 0 N − 1 x N [ n ] e − i 2 π k N n \begin{aligned}
X_N[k] &= \sum_{m=-\infty}^{\infty} \sum_{n=0}^{N-1} x[n-mN] e^{-i 2\pi \frac{k}{N} n} \\
&= \sum_{n=0}^{N-1} \sum_{m=-\infty}^{\infty} x[n-mN] e^{-i 2\pi \frac{k}{N} n} \\
&= \sum_{n=0}^{N-1} x_N[n] e^{-i 2\pi \frac{k}{N} n}
\end{aligned} X N [ k ] = m = − ∞ ∑ ∞ n = 0 ∑ N − 1 x [ n − m N ] e − i 2 π N k n = n = 0 ∑ N − 1 m = − ∞ ∑ ∞ x [ n − m N ] e − i 2 π N k n = n = 0 ∑ N − 1 x N [ n ] e − i 2 π N k n
上述变换为DFT,其中x N [ n ] = ∑ m = - ∞ ∞ x [ n - m N ] x_N[n]=\sum_{m=\text{-}\infty}^{\infty} x[n~\text{-}~mN] x N [ n ] = ∑ m = - ∞ ∞ x [ n - m N ] x [ n ] x[n] x [ n ] N N N x [ n ] x[n] x [ n ] X 1 T s ( f ) X_{\frac{1}{T_s}}(f) X T s 1 ( f ) X N [ k ] X_N[k] X N [ k ]
这里也可以看到采样与周期延拓的对偶:一个域中的采样(离散化)对应另一个域中的周期延拓(周期性)。时域信号FT为其频谱,而对时域信号采样的DTFT对应其频谱周期延拓;DTFT频谱逆变换可得到信号采样,对DTFT频谱采样的逆DFT又对应于信号采样的周期延拓。直观理解,以时域信号cos ( 2 π f t + ϕ ) \cos(2\pi f t + \phi) cos ( 2 π f t + ϕ ) cos ( 2 π f n T s + ϕ ) \cos(2\pi f nT_s + \phi) cos ( 2 π f n T s + ϕ ) f f f f + k T s f + \frac{k}{T_s} f + T s k 1 T s \frac{1}{T_s} T s 1
采样、窗口与失真
采样定理 2B 频率采样得到的离散序列完全决定。该定理被称为香农采样定理或奈奎斯特-香农(Nyquist-Shannon)采样定理。
前面已介绍,采样序列DTFT频谱为原信号频谱的无限平移求和,周期为采样频率f s = 1 T s f_s = \frac{1}{T_s} f s = T s 1 X ( f ) = X 1 T s ( f ) r e c t ( f f s ) = ∑ n = - ∞ ∞ x ( n T s ) T s r e c t ( T s f ) e − i 2 π n T s f X(f) = X_{\frac{1}{T_s}}(f) {\rm rect}(\frac{f}{f_s}) = \sum_{n=\text{-}\infty}^{\infty} x(nT_s) ~ T_s~{\rm rect}(T_sf) e^{-i 2\pi n T_sf} X ( f ) = X T s 1 ( f ) r e c t ( f s f ) = ∑ n = - ∞ ∞ x ( n T s ) T s r e c t ( T s f ) e − i 2 π n T s f
x ( t ) = ∑ n = − ∞ ∞ x ( n T s ) s i n c ( t − n T s T s ) x(t) = \sum_{n=-\infty}^{\infty} x(nT_s) ~ {\rm sinc}\left(\frac{t-nT_s}{T_s}\right)
x ( t ) = n = − ∞ ∑ ∞ x ( n T s ) s i n c ( T s t − n T s )
即将每个采样点x ( n T s ) x(nT_s) x ( n T s )
根据采样定理,当采样频率高于2倍的模拟信号最高频率,采样序列就可不失真的代表原信号,临界频率2B被称为信号的奈奎斯特采样率(Nyquist rate);相对的,对给定的采样频率f s f_s f s f s / 2 f_s/2 f s / 2 f s / 2 f_s/2 f s / 2
当采样频率超过Nyquist速率时,对信号的重建并不会有影响;当采样频率低于Nyquist速率则将出现混叠。高于采样频率一半的信号会与低于采样频率一半的信号混淆,两者虽然频率不同,但在给定采样频率下的采样值完全一样,无法做出区分。实信号的幅值频谱关于零点对称,经过采样后,频谱折叠为周期性。仅考虑非负频率,在一个周期[ 0 , f s ] [0, f_s] [ 0 , f s ] [ 1 2 f s , f s ] [\frac{1}{2}f_s, f_s] [ 2 1 f s , f s ] [ - 1 2 f s , 0 ] [\text{-}\frac{1}{2}f_s, 0] [ - 2 1 f s , 0 ] [ 0 , 1 2 f s ] [0, \frac{1}{2} f_s] [ 0 , 2 1 f s ] 1 2 f s \frac{1}{2}f_s 2 1 f s f f f f s - f f_s~\text{-}~f f s - f f f f f + n f s f+nf_s f + n f s
日常生活中,注视高速旋转的轮子时,会产生静止甚至反向旋转的错觉,就是人眼“采样频率”过低所引起的混叠。理论上,只要轮子旋转速度(信号频率)超过了人眼视觉停留刷新频率(10Hz左右)就会出现错觉:当轮子在视觉停留时间内转了大半圈(频率超过采样频率一半)或者整数圈多一点,则主观会认为轮子每次反向旋转了一点,从而产生缓慢倒转的错觉;当轮子大致在视觉停留时间内刚好转整数圈,则主观会认为轮子保持静止。
采样定理的推广
非均匀采样
非基带信号(带通采样 )f s f_s f s ( - 1 2 f s , 1 2 f s ) (\text{-}\frac{1}{2}f_s, \frac{1}{2}f_s) ( - 2 1 f s , 2 1 f s ) ( - f H , - f L ) ∪ ( f L , f H ) (\text{-}f_H, \text{-}f_L) \cup (f_L, f_H) ( - f H , - f L ) ∪ ( f L , f H ) ( - n + 1 2 f s , - n 2 f s ) ∪ ( n 2 f s , n + 1 2 f s ) (\text{-}\frac{n+1}{2}f_s, \text{-}\frac{n}{2}f_s) \cup (\frac{n}{2}f_s, \frac{n+1}{2}f_s) ( - 2 n + 1 f s , - 2 n f s ) ∪ ( 2 n f s , 2 n + 1 f s ) n n n ( n 2 f s , n + 1 2 f s ) (\frac{n}{2}f_s, \frac{n+1}{2}f_s) ( 2 n f s , 2 n + 1 f s ) ( f L , f H ) (f_L, f_H) ( f L , f H ) 2 n + 1 f H ≤ f s ≤ 2 n f L \frac{2}{n+1}f_H \le f_s \le \frac{2}{n}f_L n + 1 2 f H ≤ f s ≤ n 2 f L n n n n n n 2 n + 1 f H ≤ 2 n f L \frac{2}{n+1}f_H \le \frac{2}{n}f_L n + 1 2 f H ≤ n 2 f L n ≤ f L f H − f L n \le \frac{f_L}{f_H-f_L} n ≤ f H − f L f L n = ⌊ f L f H − f L ⌋ n = \lfloor\frac{f_L}{f_H-f_L}\rfloor n = ⌊ f H − f L f L ⌋ 2 n + 1 f H = 2 f H ⌊ f H / ( f H − f L ) ⌋ ≳ 2 ( f H - f L ) \frac{2}{n+1}f_H = \frac{2 f_H}{\lfloor f_H/(f_H-f_L)\rfloor} \gtrsim 2(f_H~\text{-}~f_L) n + 1 2 f H = ⌊ f H / ( f H − f L ) ⌋ 2 f H ≳ 2 ( f H - f L )
非基带+非均匀采样
最后,Nyquist条件是无损重建的充分条件,但并非必要条件,如果信号存在额外的限制条件,采样频率下限是可以打破。比如,对于有效带宽为EB的频域稀疏信号,即信号频率分布在不连续的子频带,而非连续的频带,此时前面带通信号的技巧不再适用,因此原则上采样频率需要是频率上限的2倍。但利用压缩感知技术,则可用略低于2倍有效带宽的频率进行采样,并实现无损重建。不过在这种情况下,简单的香农插值公式就不在适用,信号的重建需要借助线性规划。此外,考虑到离散信号到数字信号的量化(Quantization)过程,信号重建的误差存在下限,进而对采样频率的要求也可适当放松(无需强求无损)。
窗口函数
窗口函数简单说就是仅在有限的区间(窗口)内非零的函数,通常关于区间中心呈对称分布,且在中心附近取值最大,向两侧逐渐衰减,最简单的就是矩形窗口。作为时间的函数,常见窗口函数大致可分为幂窗、三角窗、指数窗三类:幂窗为时间的幂函数,如矩形、三角形、抛物线等;三角窗为时间的三角函数,包括汉宁窗、海明窗、图基窗、平顶窗等;指数窗则为时间的指数形式,如高斯窗、泊松窗。
从时域角度理解,任意函数与窗口函数相乘后,将仅保留窗口内的数值。在频谱分析时,会将截取的片段作为周期函数的单个周期进行DFT。对于周期信号,简单的信号截取(矩形窗),如果刚好覆盖整数周期(相干采样),则延拓得到的时域信号与原信号一致,并不存在频谱泄露。但如果截取的并非整数周期(非相干采样),则延拓时边界处将存在跳变,而脉冲信号(跳变)对应延展的频谱。下图展示的是用长度1s的窗口(对应频谱分辨率1Hz),截取50Hz和50.5Hz正弦信号后的频谱,可以明显看到频谱泄露。窗口函数通过压低边界值,对延拓边界进行平滑,避免了跳变,进而减少频谱泄露。这正是引入窗口函数的主要目的,通过适当的窗口函数对信号进行调制,可减轻频谱泄露对后续分析的影响。
从频域角度理解,根据卷积定理,信号乘以窗口函数后,其频谱为原信号频谱与窗口函数频谱进行卷积操作。而窗口函数的频谱可理解为对频率为0的余弦波cos ( 2 π 0 t ) \cos(2\pi 0 t) cos ( 2 π 0 t )
理想中的窗口函数频谱是主瓣宽度窄、旁瓣幅值低且衰减快,实际两者并不可兼得:较窄的主瓣通常伴随较高的旁瓣,这种窗口对于频率识别精度高,但弱信号容易被旁瓣遮蔽,幅值容许范围较窄(高分辨率、低动态范围);相对的,较宽的主瓣结合较低的旁瓣,这种窗口对幅值差别宽容度大,但对于频率分辨率低,频率接近的成分容易因展宽而无法分辨(高动态范围、低分辨率)。具体的,矩形窗主瓣窄但旁瓣高,属于高分辨率、低动态范围;平顶窗、布莱克曼窗主瓣宽但旁瓣低且衰减快,属于高动态范围、低分辨率;汉宁窗、海明窗则介于两者之间,在对频率分辨率有要求的窄带分析中较为常见。
窗口函数的量化属性主要有(等效)噪声带宽、最高旁瓣以及旁瓣衰减。其中噪声带宽为窗口频谱的等效展宽,代表了整体的泄露情况,主要决定于主瓣宽度。而随机噪声信号产生的噪声水平(noise floor)正比于窗口函数的噪声带宽,这会影响信号分析。比如高动态范围的窗口理论上有助于识别弱信号,但当存在随机噪声时,高动态范围窗口(噪声带宽宽)通常对应更高的噪声水平,最终影响对于弱信号的灵敏度。而低动态范围的窗口由于有更低的噪声水平,反而有助于提升信噪比(但又会受栅栏效应影响)。又比如对于爆发信号,信号峰值集中于窗口一端,矩形窗之外的窗口函数都将压制大部分的信号能量,降低信噪比。根据窗口函数对于信号和(加性)噪声的不同响应,可在信号处理时产生额外的分析增益或损失,实际中应根据信号性质及最终需求进行选择。
主瓣宽,信号强度准,但噪声水平高;主瓣窄,噪声水平低,但信号强度不准
ref 频谱失真
信号混叠(aliasing):源于采样,由过低的采样频率引入;
频谱泄露(spectral leakage):源于截断,由非周期截断引入;
栅栏效应(picket-fence effect, scalloping loss):源于频域采样(时域延拓)。
混叠和泄露前面已介绍,虽然都会使频谱失真,但窗口函数导致的频谱泄露是局部的频谱展宽与界限模糊;采样导致的混叠则是频谱折叠对应的整体上的、周期性的模糊。增加窗口宽度及选择合适的窗口函数是抑制频谱泄露的关键,避免混叠则需要提升采样率。
这里主要介绍下栅栏效应:时域信号的周期性延拓对应于频域采样,采样间隔(频率分辨率)为时域窗口宽度的倒数。设采样频率为f s f_s f s N N N N / f s N/f_s N / f s f s / N f_s/N f s / N
对于周期性信号,理论上偏离实际频率幅值就为零,但考虑到非周期性截断所引入的频谱泄露,相邻频率的幅值并非0,但会低于真实频率幅值。延用前面频谱泄露的例子,1s的窗口对应频率分辨率1Hz,对于50.5Hz的信号只能给出在50Hz和51Hz处的谱值(来自于频谱泄露),而无法给出50.5Hz处的峰值,这就是栅栏效应,也被称为扇形损失(泄露呈扇形)。显然频谱泄露越严重,相邻谱线与真实频率幅值偏差小,栅栏效应越不明显。此外,当信号频率刚好位于谱线中间时,扇形损失最显著。
栅栏效应可在不增加数据前提下通过“补零”进行改善。前面已介绍,时域信号周期性延拓 + DFT,对应于DTFT频谱的采样,而在输入序列末尾补零可调整采样的位置。将x n {x_n} x n x m {x_m} x m
∑ 0 M − 1 x m e − i 2 π k M m = ∑ 0 N − 1 x m e − i 2 π k M m , k ∈ [ 0 , . . . , M − 1 ] \sum_{0}^{M-1} x_m e^{-i 2\pi\frac{k}{M} m} = \sum_{0}^{N-1} x_m e^{-i 2\pi\frac{k}{M} m}, k\in[0, ..., M-1]
0 ∑ M − 1 x m e − i 2 π M k m = 0 ∑ N − 1 x m e − i 2 π M k m , k ∈ [ 0 , . . . , M − 1 ]
频率采样位置由k N \frac{k}{N} N k k M \frac{k}{M} M k 2 n 2^n 2 n
补零降低了频域采样间隔,看似增加了对频率的分辨精度,但实际频率分辨率保持不变。从频域采样角度理解,补零增加了对截断信号DTFT的采样,最终也只是逼近原信号DTFT连续谱,而后者的频率分辨率始终为信号有效时长的倒数。从窗口截断角度理解,频谱分辨率受限于频谱泄露导致的谱线展宽,展宽(泄露)随窗口宽度增加而减小,对应于频率分辨率随信号时长增加而增加,数据补零并没有增加窗口的有效宽度,也就不能改善频谱泄露。因此补零虽然在效果上可以平滑频谱,但其整体包络线对应的依然是信号截断导致的频谱泄露(DTFT连续频谱)。从时域采样角度理解,补零增加了采样点数,但有效信号时长保持不变,只相当于增加了平均采样率 f s ′ = M N f s f'_s=\frac{M}{N}f_s f s ′ = N M f s f s ′ M = f s N \frac{f'_s}{M}=\frac{f_s}{N} M f s ′ = N f s
下图中,输入信号为50Hz和50.5Hz两个频率的正弦波,1s采样对应频率分辨率为1Hz,无法分辨出两个频率,也无法给出50.5Hz处的幅值。通过补零增加一倍的采样点,可以给出50.5Hz处的幅值,改善了栅栏效应,但频谱的整体展宽趋势不变,只是对原频谱进行了更密集的采样。而11s采样则可以明显看到50Hz和50.5Hz的两个频率峰,不过50.5Hz处幅值由于栅栏效应存在低估(同样可通过补零改善)。
窗口对称性 x ( - t ) ↔ X ( - ω ) x(\text{-}t) \leftrightarrow X(\text{-}\omega) x ( - t ) ↔ X ( - ω ) X ( ω ) = X ( - ω ) X(\omega)=X(\text{-}\omega) X ( ω ) = X ( - ω ) X ( - ω ) = X ( ω ) ‾ X(\text{-}\omega)= \overline{X(\omega)} X ( - ω ) = X ( ω ) X ( ω ) = X ( ω ) ‾ X(\omega)=\overline{X(\omega)} X ( ω ) = X ( ω ) [ − T 2 , T 2 ] [-\frac{T}{2}, \frac{T}{2}] [ − 2 T , 2 T ] rect ( t T ) \text{rect}\left(\frac{t}{T}\right) rect ( T t ) T sinc ( T ω 2 π ) T\text{sinc}\left(T \frac{\omega}{2\pi}\right) T sinc ( T 2 π ω ) [ 0 , T ] [0, T] [ 0 , T ] T sinc ( T ω 2 π ) e − i ω T 2 T\text{sinc}\left(T \frac{\omega}{2\pi}\right)e^{-i \omega \frac{T}{2}} T sinc ( T 2 π ω ) e − i ω 2 T f = k T f=\frac{k}{T} f = T k
对于经过采样的(离散)窗口函数w [ n ] w[n] w [ n ] X ( ω ) X(\omega) X ( ω ) [ - N 2 , N 2 ] [\text{-}\frac{N}{2},\frac{N}{2}] [ - 2 N , 2 N ] N 2 \frac{N}{2} 2 N [ 0 , N ] [0, N] [ 0 , N ] X ′ ( ω ) = e − i ω N 2 X ( ω ) X'(\omega)=e^{-i \omega \frac{N}{2}}X(\omega) X ′ ( ω ) = e − i ω 2 N X ( ω ) k N \frac{k}{N} N k 1 N + 1 \frac{1}{N+1} N + 1 1 k N + 1 \frac{k}{N+1} N + 1 k
因此,实际计算DFT时会舍弃最后一个样本(考虑到w[N]=0舍弃的是最后的零),取[ 0 , N ) [0, N) [ 0 , N )
最后,除了在频谱分析时截断信号,窗口函数还常用于滤波设计,通过对理想的脉冲响应加窗得到有限冲激响应(Finite impulse response, FIR)滤波器。不过滤波器设计中使用的是对称窗口,而非不对称的周期性窗口。此外,在统计分析中也会用到窗口函数,通过加权限制用于分析的数据范围,在贝叶斯分析中,窗口函数通常被称为“核函数”。
离散傅里叶 DFT函数等间隔采样的有限序列 ↔ D F T \xleftrightarrow{DFT} D F T
X k = ∑ n = 0 N − 1 x n e − i 2 π k N n , k ∈ [ 0 , N − 1 ] ; x n = 1 N ∑ k = 0 N − 1 X k e i 2 π k N n , n ∈ [ 0 , N − 1 ] \boxed{X_k = \sum_{n=0}^{N-1} x_n e^{-i\frac{2\pi k}{N} n}, k \in [0, N -1]; ~~~ x_n = \frac{1}{N}\sum_{k=0}^{N-1} X_k e^{i\frac{2\pi k}{N} n}, n \in [0, N -1]}
X k = n = 0 ∑ N − 1 x n e − i N 2 π k n , k ∈ [ 0 , N − 1 ] ; x n = N 1 k = 0 ∑ N − 1 X k e i N 2 π k n , n ∈ [ 0 , N − 1 ]
这里时域的n n n t t t k k k f f f 1 N \frac{1}{N} N 1 1 N \frac{1}{N} N 1 X k X_k X k α k \alpha_k α k X k N \frac{X_k}{N} N X k X k X_k X k X k X_k X k X k X_k X k
将序列{ X k } , { x n } \{X_k\}, \{x_n\} { X k } , { x n }
( X 0 ⋮ X k ⋮ X N − 1 ) = ( 1 1 1 … 1 1 e − i 2 π N e − i 2 π N 2 … e − i 2 π N ( N − 1 ) 1 e − i 2 π N 2 e − i 2 π N 4 … e − i 2 π N 2 ( N − 1 ) ⋮ ⋮ ⋮ ⋱ ⋮ 1 e − i 2 π N ( N − 1 ) e − i 2 π N 2 ( N − 1 ) … e − i 2 π N ( N − 1 ) 2 ) ( x 0 ⋮ x n ⋮ x N − 1 ) \begin{pmatrix} X_0 \\ \vdots \\ X_k \\ \vdots \\ X_{N-1} \end{pmatrix} = \begin{pmatrix} 1& 1& 1& \dots& 1 \\ 1 & e^{-i \frac{2\pi}{N}}& e^{-i \frac{2\pi}{N} 2}& \dots & e^{-i \frac{2\pi}{N}(N-1)} \\ 1 & e^{-i\frac{2\pi}{N} 2}& e^{-i \frac{2\pi}{N} 4}& \dots & e^{-i \frac{2\pi}{N} 2(N-1)} \\ \vdots& \vdots& \vdots& \ddots& \vdots \\ 1& e^{-i \frac{2\pi}{N}(N-1)}& e^{-i \frac{2\pi}{N}2(N-1)}& \dots& e^{-i \frac{2\pi}{N} (N-1)^2} \end{pmatrix} \begin{pmatrix} x_0 \\ \vdots \\ x_n \\ \vdots \\ x_{N-1} \end{pmatrix}
⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ X 0 ⋮ X k ⋮ X N − 1 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞ = ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ 1 1 1 ⋮ 1 1 e − i N 2 π e − i N 2 π 2 ⋮ e − i N 2 π ( N − 1 ) 1 e − i N 2 π 2 e − i N 2 π 4 ⋮ e − i N 2 π 2 ( N − 1 ) … … … ⋱ … 1 e − i N 2 π ( N − 1 ) e − i N 2 π 2 ( N − 1 ) ⋮ e − i N 2 π ( N − 1 ) 2 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞ ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ x 0 ⋮ x n ⋮ x N − 1 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞
( X 0 ⋮ X k ⋮ X N − 1 ) = ( w 0 w 0 w 0 … w 0 w 0 w 1 w 2 … w N − 1 w 0 w 2 w 4 … w 2 ( N − 1 ) ⋮ ⋮ ⋮ ⋱ ⋮ w 0 w N − 1 w 2 ( N − 1 ) … w ( N − 1 ) 2 ) ( x 0 ⋮ x n ⋮ x N − 1 ) \begin{pmatrix} X_0 \\ \vdots \\ X_k \\ \vdots \\ X_{N-1} \end{pmatrix} = \begin{pmatrix} w^0& w^0& w^0& \dots& w^0 \\ w^0& w^1& w^2& \dots & w^{N-1} \\ w^0& w^2& w^4& \dots & w^{2(N-1)} \\\vdots& \vdots& \vdots& \ddots& \vdots \\ w^0 & w^{N-1}& w^{2(N-1)}& \dots& w^{(N-1)^2} \end{pmatrix} \begin{pmatrix} x_0 \\ \vdots \\ x_n \\ \vdots \\ x_{N-1} \end{pmatrix}
⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ X 0 ⋮ X k ⋮ X N − 1 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞ = ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ w 0 w 0 w 0 ⋮ w 0 w 0 w 1 w 2 ⋮ w N − 1 w 0 w 2 w 4 ⋮ w 2 ( N − 1 ) … … … ⋱ … w 0 w N − 1 w 2 ( N − 1 ) ⋮ w ( N − 1 ) 2 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞ ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ x 0 ⋮ x n ⋮ x N − 1 ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞
X = ( e − i 2 π N k n ) N × N x = ( w k n ) N × N x = W x \bm{X} = \Bigl( e^{-i\frac{2\pi}{N} k n} \Bigr)_{N\times N} ~ \bm{x} = \Bigl(w^{kn}\Bigr)_{N\times N} ~ \bm{x} = W\bm{x}
X = ( e − i N 2 π k n ) N × N x = ( w k n ) N × N x = W x
其中w = e − i 2 π N w=e^{-i\frac{2\pi}{N}} w = e − i N 2 π
离散傅里叶变换默认输出等于输入长度相同,即N个时间点对应N个频率点。调整输出长度对应于对输入序列进行补零或截断操作,输出长度为N的FFT通常被称为N点FFT。从对DTFT频谱采样角度理解,输出为离散序列DTFT的采样:采样点N等于输入序列长度L,对应于对输入直接周期性延拓后的DTFT,刚好对应N个离散频率;当采样点N大于输入序列长度L,会进行补零操作,相当于对原信号DTFT进行更密集的采样,频率分辨率不变但输出频点位置会改变;当采样点N小于输入序列长度L,从对DTFT频谱采样角度理解应该对输入做折叠,不过根据上面的DFT定义,实际采取的是将输入做截断,此时DFT对应的已不再是对完整输入DTFT的采样,而是对截断信号DTFT的采样,频谱不同,频率分辨率也会降低。对于平稳信号,在分辨率满足需求的前提下适当截断问题不大,可减少计算量。
DFT计算细节:
频谱采样:DTF时频域长度相同,N点时间采样对应N点频率采样,且频谱周期对应信号采样率f s f_s f s f k = k N f s f_k = \frac{k}{N} f_s f k = N k f s
频率范围:频率f = k N f s f=\frac{k}{N}f_s f = N k f s k ∈ [ 0 , N − 1 ] k \in [0, N -1] k ∈ [ 0 , N − 1 ] [ 0 , f s ) [0, f_s) [ 0 , f s ) [ − 1 2 f s , 1 2 f s ] [-\frac{1}{2}f_s, \frac{1}{2}f_s] [ − 2 1 f s , 2 1 f s ] N − 1 N f s \frac{N-1}{N}f_s N N − 1 f s f s f_s f s
基带频率:基于DTFT频谱的周期性,[ 1 2 f s , f s ) [\frac{1}{2}f_s, f_s) [ 2 1 f s , f s ) [ − 1 2 f s , 0 ) [-\frac{1}{2}f_s, 0) [ − 2 1 f s , 0 ) fftfreq)。最终,DFT频谱中第一个分量X [ 0 ] X[0] X [ 0 ]
频谱平移:进一步的可将负频率移至序列前面,或者说将零频率移至中间(fftshift, np.roll(arr, N//2))。Numpy中会将Nyquist频率移至最前面,对应− 1 2 f s -\frac{1}{2}f_s − 2 1 f s k k k [ − 1 2 f s , 1 2 f s ) [-\frac{1}{2}f_s, \frac{1}{2}f_s) [ − 2 1 f s , 2 1 f s ) ( − 1 2 f s , 1 2 f s ) (-\frac{1}{2}f_s, \frac{1}{2}f_s) ( − 2 1 f s , 2 1 f s )
单边频谱:对实信号,频谱具有共轭对称性(功率谱具有对称性),可仅保留正频谱。同样由于Nyquist频率只有N为偶数才能取到,最终偶数N对应区间[ 0 , 1 2 f s ] [0, \frac{1}{2}f_s] [ 0 , 2 1 f s ] [ 0 , 1 2 f s ) [0, \frac{1}{2}f_s) [ 0 , 2 1 f s )
最后再强调一遍,实信号双边谱具有共轭对称性,但计算中双边谱的数组并非中心对称!而是X[0]对应零频率,剩余部分中心对称!且零频率和Nyquist频率对应频谱必须是实数,其余部分可为虚数(共轭对称)。
1 2 3 4 5 6 7 8 9 spec = np.random.randn(100 ) spectrum = np.r_[spec, spec[::-1 ]] singal = np.fft.ifft(spectrum) plt.plot(singal.imag, '.' ) spectrum = np.r_[spec, spec[1 :][::-1 ]] singal = np.fft.ifft(spectrum) plt.plot(singal.imag) plt.show()
DFT基本性质:
零点:X [ 0 ] = ∑ 0 N − 1 x n X[0]=\sum_{0}^{N-1} x_n X [ 0 ] = ∑ 0 N − 1 x n
不确定性原理:Δ f = 1 N Δ t , Δ t Δ f = 1 N \Delta f = \frac{1}{N\Delta t}, ~~ \Delta t \Delta f = \frac{1}{N} Δ f = N Δ t 1 , Δ t Δ f = N 1
线性:F { x + y } = F { x } + F { y } , F { a x } = a F { x } \mathcal{F}\{x + y\} = \mathcal{F}\{x\} + \mathcal{F}\{y\}, \mathcal{F}\{a x\} = a\mathcal{F}\{x\} F { x + y } = F { x } + F { y } , F { a x } = a F { x }
反转:{ x N − n } ↔ { X N − k } \{x_{N-n}\} \xleftrightarrow{} \{X_{N-k}\} { x N − n } { X N − k }
平移:{ x n e i 2 π n N l } ↔ { X k − l } \{x_n e^{i2\pi\frac{n}{N}l}\} \xleftrightarrow{} \{X_{k-l}\} { x n e i 2 π N n l } { X k − l } { x n − l } ↔ { X k e − i 2 π k N l } \{x_{n-l}\} \xleftrightarrow{} \{X_k e^{-i 2\pi \frac{k}{N} l}\} { x n − l } { X k e − i 2 π N k l }
共轭:{ x ‾ n } ↔ { X ‾ N − k } \{\overline{x}_{n}\} \xleftrightarrow{} \{\overline{X}_{N-k}\} { x n } { X N − k } x n ∈ R x_n \in \R x n ∈ R X k = X ‾ N − k X_k = \overline{X}_{N-k} X k = X N − k
帕塞瓦尔(Parseval)定理:∑ n = 0 N − 1 x n y ‾ n = 1 N ∑ k = 0 N − 1 X k Y ‾ k \sum_{n=0}^{N-1} x_n \overline{y}_n = \frac{1}{N}\sum_{k=0}^{N-1} X_k \overline{Y}_k ∑ n = 0 N − 1 x n y n = N 1 ∑ k = 0 N − 1 X k Y k ∑ n = 0 N − 1 ∣ x n ∣ 2 = 1 N ∑ k = 0 N − 1 ∣ X k ∣ 2 \sum_{n=0}^{N-1} |x_n|^2 = \frac{1}{N}\sum_{k=0}^{N-1} |X_k|^2 ∑ n = 0 N − 1 ∣ x n ∣ 2 = N 1 ∑ k = 0 N − 1 ∣ X k ∣ 2
卷积:循环卷积 x ⊛ y = x ∗ y N = ∑ l = 0 N − 1 x l y ( n − l ) mod N ↔ X Y x \circledast y = x * y_N = \sum_{l=0}^{N-1} x_{\tiny l}~y_{_{(n-l)~\text{mod}~N}} \xleftrightarrow{} X Y x ⊛ y = x ∗ y N = ∑ l = 0 N − 1 x l y ( n − l ) mod N X Y x y ↔ 1 N X ⊛ Y x y \xleftrightarrow{} \frac{1}{N} X \circledast Y x y N 1 X ⊛ Y 1 N \frac{1}{N} N 1
相关:循环相关 x ⊗ y = x ⋆ y N = ∑ l = 0 N − 1 x l y ( n + l ) mod N ↔ X ‾ Y x \otimes y = x \star y_N = \sum_{l=0}^{N-1} x_{\tiny l}~y_{_{(n+l)~\text{mod}~N}}\xleftrightarrow{} \overline{X} Y x ⊗ y = x ⋆ y N = ∑ l = 0 N − 1 x l y ( n + l ) mod N X Y x ∗ y N = DTFT − 1 [ DTFT ( x ) DTFT ( y N ) ] = DFT − 1 [ DFT ( x N ) DFT ( y N ) ] x*y_N = \text{\footnotesize DTFT}^{-1}[\text{\footnotesize DTFT}(x)\text{\footnotesize DTFT}(y_N)] = \text{\footnotesize DFT}^{-1}[\text{\footnotesize DFT}(x_N)\text{\footnotesize DFT}(y_N)] x ∗ y N = DTFT − 1 [ DTFT ( x ) DTFT ( y N ) ] = DFT − 1 [ DFT ( x N ) DFT ( y N ) ] x x x y N y_N y N N N N DTFT ( y N ) \text{\footnotesize DTFT}(y_N) DTFT ( y N ) DTFT ( x ) \text{\footnotesize DTFT}(x) DTFT ( x ) x x x x N x_N x N x x x y N y_N y N N N N { y n mod N } \{y_{n~\text{mod}~N}\} { y n mod N } x x x N N N x N x_N x N x x x x ⊛ y = x ∗ y N x \circledast y = x * y_N x ⊛ y = x ∗ y N
快速傅里叶 FFTDFT默认的矩阵乘法计算复杂度为O(N2 ),而变换矩阵的对称性与周期性使加速成为可能。具体实现有很多,但计算复杂度目前都在 O(NlogN) 量级,其中最著名的是 Cooley–Tukey 算法,核心思想是基于分治策略将长度N的序列变换缩减为更短序列的变换。
对于长度N(偶数)的序列x n x_n x n
X k = ∑ m = 0 N 2 − 1 x 2 m w N 2 m k + ∑ m = 0 N 2 − 1 x 2 m + 1 w N ( 2 m + 1 ) k = ∑ m = 0 N 2 − 1 x 2 m w N 2 m k + w k ∑ m = 0 N 2 − 1 x 2 m + 1 w N 2 m k = ∑ m = 0 N 2 − 1 x 2 m w N / 2 m k + w k ∑ m = 0 N 2 − 1 x 2 m + 1 w N / 2 m k = X e v e n [ k ] + w k X o d d [ k ] , k = 0 , . . . , N − 1 \begin{aligned}
X_k &= \sum_{m=0}^{\frac{N}{2}-1} x_{2m} w_N^{2mk} + \sum_{m=0}^{\frac{N}{2}-1} x_{2m+1} w_N^{(2m+1)k}\\
&=\sum_{m=0}^{\frac{N}{2}-1} x_{2m} w_N^{2mk} + w^{k} \sum_{m=0}^{\frac{N}{2}-1} x_{2m+1} w_N^{2mk}\\
&=\sum_{m=0}^{\frac{N}{2}-1} x_{2m} w_{N/2}^{mk} + w^{k} \sum_{m=0}^{\frac{N}{2}-1} x_{2m+1} w_{N/2}^{mk}\\
&= X_{\rm even}[k] + w^{k}X_{\rm odd}[k], ~~~~ k=0, ..., N-1
\end{aligned} X k = m = 0 ∑ 2 N − 1 x 2 m w N 2 m k + m = 0 ∑ 2 N − 1 x 2 m + 1 w N ( 2 m + 1 ) k = m = 0 ∑ 2 N − 1 x 2 m w N 2 m k + w k m = 0 ∑ 2 N − 1 x 2 m + 1 w N 2 m k = m = 0 ∑ 2 N − 1 x 2 m w N / 2 m k + w k m = 0 ∑ 2 N − 1 x 2 m + 1 w N / 2 m k = X e v e n [ k ] + w k X o d d [ k ] , k = 0 , . . . , N − 1
其中 X o d d , X e v e n X_{\rm odd}, X_{\rm even} X o d d , X e v e n x n x_n x n k ∈ [ 0 , N − 1 ] k\in [0, {\small N-}1] k ∈ [ 0 , N − 1 ] X e v e n , X o d d X_{\rm even}, X_{\rm odd} X e v e n , X o d d k ∈ [ 0 , N 2 − 1 ] k\in [0, \frac{N}{2}-1] k ∈ [ 0 , 2 N − 1 ] N 2 \frac{N}{2} 2 N
X k + N 2 = X e v e n [ k + N 2 ] + w k + N 2 X o d d [ k + N 2 ] = X e v e n [ k ] − w k X o d d [ k ] \begin{aligned}
X_{k+\frac{N}{2}} &= X_{\rm even}\left[k+ {\small \frac{N}{2}}\right] + w^{k+\frac{N}{2}}X_{\rm odd}\left[k+ {\small \frac{N}{2}}\right]\\
&=X_{\rm even}[k] - w^{k}X_{\rm odd}[k]
\end{aligned} X k + 2 N = X e v e n [ k + 2 N ] + w k + 2 N X o d d [ k + 2 N ] = X e v e n [ k ] − w k X o d d [ k ]
上述推导中利用了N次单位根的性质w a + N = w a , w a + N 2 = − w a , w N a = w N / b a / b w^{a+N} = w^a, w^{a+\frac{N}{2}} = -w^a, w^{a}_{N} = w^{a/b}_{N/b} w a + N = w a , w a + 2 N = − w a , w N a = w N / b a / b 2 )降至O(NlogN)。注意这里仅针对N为2的指数,对一般情况同样存在类似分解,不过在N为2的指数时FFT效率最高,因此通常N都会取为2的指数,计算时进行补零操作。
谱分析 Spectrum
物理上的“谱”(spectrum)的概念最初由牛顿提出,用于描述白光经过棱镜后的色散带。之后扩展为光强(功率)关于频率的函数,并最终扩展至任意信号的频域函数。作为频率的函数,频谱对应信号在频域分解时,不同频率成分的占比,反映出很多信号的内在特性。
能谱、功率谱
根据频率取值,频谱有离散谱和连续谱,而根据具体对的物理量,又有很多不同含义。
横轴频率取值:(离散)谱 v.s. 谱密度
纵轴物理量:幅度谱、相位谱、能谱、功率谱
复频谱 X ( f ) X(f) X ( f ) X ( f ) X(f) X ( f ) X ( f ) = A ( f ) e i ϕ ( f ) X(f) = A(f)e^{i\phi(f)} X ( f ) = A ( f ) e i ϕ ( f ) A ( f ) = ∣ X ( f ) ∣ A(f) = |X(f)| A ( f ) = ∣ X ( f ) ∣ ϕ ( f ) = angle [ X ( f ) ] \phi(f) = \text{angle}[X(f)] ϕ ( f ) = angle [ X ( f ) ] X k X_k X k X ( f k ) X(f_k) X ( f k ) α k \alpha_k α k
X k = ∑ x n e − i 2 π k N n = ∑ x n e − i 2 π f k t n , X ( f ) = ∫ x ( t ) e − i 2 π f t d t , α k = 1 T ∫ x ( t ) e − i 2 π f k t d t X_k = \sum x_n e^{-i 2 \pi \frac{k}{N} n} = \sum x_n e^{-i 2 \pi f_k t_n}, ~~~~~ X(f) = \int x(t)e^{-i2 \pi f t} dt,~~~~~ \alpha_k = \frac{1}{T}\int x(t)e^{-i2 \pi f_k t} dt
X k = ∑ x n e − i 2 π N k n = ∑ x n e − i 2 π f k t n , X ( f ) = ∫ x ( t ) e − i 2 π f t d t , α k = T 1 ∫ x ( t ) e − i 2 π f k t d t
这里f k = k N f s , t n = n f s = n T s f_k = \frac{k}{N}f_s, ~t_n = \frac{n}{f_s} = nT_s f k = N k f s , t n = f s n = n T s X k X_k X k X ( f ) X(f) X ( f ) d t dt d t T s T_s T s
X k = 1 T s X ( f k ) = X ( f k ) f s ; α k = 1 N X k = 1 T X ( f k ) \boxed{X_k = \frac{1}{T_s}X(f_k) = X(f_k)f_s; ~~~ \alpha_k = \frac{1}{N}X_k = \frac{1}{T}X(f_k)}
X k = T s 1 X ( f k ) = X ( f k ) f s ; α k = N 1 X k = T 1 X ( f k )
注意,对于平稳的信号或随机过程,虽然各频率成分振幅α k \alpha_k α k X ( f ) X(f) X ( f ) T T T X k X_k X k N N N X ( f ) X(f) X ( f ) X k X_k X k
能谱 (Energy Spectral Density, ESD)能量 ”的概念:
E = ⟨ x ( t ) , x ( t ) ⟩ = ∫ ∣ x ( t ) ∣ 2 d t E = ⟨x(t), x(t)⟩ = \int |x(t)|^2 dt
E = ⟨ x ( t ) , x ( t ) ⟩ = ∫ ∣ x ( t ) ∣ 2 d t
注意,这里的能量是信号分析意义上的能量,而非严格物理意义上的能量。对于现实的物理过程,两者通常是成正比,比如对于电压或电流信号,直接平方积分显然不是能量,但如果考虑到系统电阻固定,则两者区别只在于比例常数。而一般地,在数学上,对于任意的抽象时域函数,上述定义并不具有物理意义上能量的含义,不过依据惯例,仍会类比物理过程,称之为“能量”。
所谓能谱就是信号“能量”关于频率的分布,根据Parseval定理:
∫ ∣ x ( t ) ∣ 2 d t = ∫ ∣ X ( f ) ∣ 2 d f \int |x(t)|^2 dt = \int |X(f)|^2 df
∫ ∣ x ( t ) ∣ 2 d t = ∫ ∣ X ( f ) ∣ 2 d f
据此可以定义能谱密度:
S E ( f ) = ∣ X ( f ) ∣ 2 \boxed{S_E(f) = |X(f)|^2}
S E ( f ) = ∣ X ( f ) ∣ 2
进一步根据自相关定义:
∣ X ( f ) ∣ 2 = X ( f ) ‾ X ( f ) = F { x ( t ) ⋆ x ( t ) } |X(f)|^2 = \overline{X(f)}X(f) = \mathcal{F}\Big\{x(t) \star x(t) \Big\}
∣ X ( f ) ∣ 2 = X ( f ) X ( f ) = F { x ( t ) ⋆ x ( t ) }
S ( f ) = F { r x x ( t ) } = ∫ r x x ( t ) e − i 2 π f t d t S(f) = \mathcal{F} \Big\{r_{xx}(t) \Big\} = \int r_{xx}(t)e^{- i 2\pi f t } ~ dt
S ( f ) = F { r x x ( t ) } = ∫ r x x ( t ) e − i 2 π f t d t
显然能量(及能谱)的定义仅适用于能量积分收敛情况,即要求信号的总能量有限,被称为能量信号。能量信号傅里叶变换一般是存在的,常见的是短时脉冲或爆发等集中在有限时间段的信号。对于持续存在的信号,总能量发散,此时需要使用功率的概念。
功率谱 (Power Spectral Density, PSD)x ( t ) x(t) x ( t ) x T ( t ) = x ( t ) w T ( t ) x_T(t)=x(t)w_T(t) x T ( t ) = x ( t ) w T ( t ) X T ( f ) X_T(f) X T ( f ) x T ( t ) x_T(t) x T ( t )
P x T = E x T T = 1 T ∫ ∣ x T ( t ) ∣ 2 d t P_{x_T} = \frac{E_{x_T}}{T} = \frac{1}{T} \int |x_T(t)|^2 dt
P x T = T E x T = T 1 ∫ ∣ x T ( t ) ∣ 2 d t
当截取区间长度趋向无穷,x T ( t ) x_T(t) x T ( t ) x ( t ) x(t) x ( t ) T → ∞ T\rightarrow \infty T → ∞
P = lim T → ∞ P x T = lim T → ∞ 1 T ∫ ∣ x T ( t ) ∣ 2 d t P = \lim_{T\rightarrow \infty} P_{x_T} = \lim_{T\rightarrow \infty} \frac{1}{T} \int |x_T(t)|^2 dt
P = T → ∞ lim P x T = T → ∞ lim T 1 ∫ ∣ x T ( t ) ∣ 2 d t
功率(及功率谱)的概念需要上述极限存在(且非0),此时x ( t ) x(t) x ( t ) 各态历经 的随机过程,从统计角度理解,上述平均功率对应的其实是随机过程的方差(通常会提前减去均值),而功率谱则对应不同频率成分所贡献的方差,具体可参考对随机过程 的介绍。
功率非零意味T → ∞ T\rightarrow \infty T → ∞ x ( t ) x(t) x ( t ) x T ( t ) x_T(t) x T ( t )
∫ ∣ x T ( t ) ∣ 2 d t = ∫ ∣ X T ( f ) ∣ 2 d f \int |x_T(t)|^2 dt = \int |X_T(f)|^2 df
∫ ∣ x T ( t ) ∣ 2 d t = ∫ ∣ X T ( f ) ∣ 2 d f
由此可定义功率谱密度(功率的频率分布):
S ( f ) = lim T → ∞ 1 T ∣ X T ( f ) ∣ 2 \boxed{S(f) = \lim_{T\rightarrow \infty} \frac{1}{T} |X_T(f)|^2}
S ( f ) = T → ∞ lim T 1 ∣ X T ( f ) ∣ 2
进一步,根据自相关定理:
∣ X T ( f ) ∣ 2 = X T ( f ) ‾ X T ( f ) = F { x T ( t ) ⋆ x T ( t ) } |X_T(f)|^2 = \overline{X_T(f)}X_T(f) = \mathcal{F}\Big\{x_T(t) \star x_T(t) \Big\}
∣ X T ( f ) ∣ 2 = X T ( f ) X T ( f ) = F { x T ( t ) ⋆ x T ( t ) }
S ( f ) = lim T → ∞ 1 T F { x T ( t ) ⋆ x T ( t ) } = F { lim T → ∞ x T ( t ) ⋆ x T ( t ) T } S(f) = \lim_{T\rightarrow \infty} \frac{1}{T} \mathcal{F}\Big\{x_T(t) \star x_T(t) \Big\} = \mathcal{F}\Big\{ \lim_{T\rightarrow \infty} \frac{x_T(t) \star x_T(t) }{T} \Big\}
S ( f ) = T → ∞ lim T 1 F { x T ( t ) ⋆ x T ( t ) } = F { T → ∞ lim T x T ( t ) ⋆ x T ( t ) }
最终有:
S ( f ) = F { r x x ( t ) } = ∫ r x x ( t ) e − i 2 π f t d t \boxed{S(f) = \mathcal{F} \Big\{r_{xx}(t) \Big\} = \int r_{xx}(t)e^{- i 2\pi f t } ~ dt}
S ( f ) = F { r x x ( t ) } = ∫ r x x ( t ) e − i 2 π f t d t
其中自相关函数r x x ( t ) ≡ lim T → ∞ x T ( t ) ⋆ x T ( t ) T r_{xx}(t) \equiv \lim_{T\rightarrow \infty} \frac{x_T(t) \star x_T(t)}{T} r x x ( t ) ≡ lim T → ∞ T x T ( t ) ⋆ x T ( t ) x ( t ) ⋆ x ( t ) = lim T → ∞ x T ( t ) ⋆ x T ( t ) x(t) \star x(t) =\lim_{T\rightarrow \infty} x_T(t) \star x_T(t) x ( t ) ⋆ x ( t ) = lim T → ∞ x T ( t ) ⋆ x T ( t ) x ( t ) x(t) x ( t ) r x x ( t ) r_{xx}(t) r x x ( t )
能谱 v.s. 功率谱
能谱和功率谱都对应于信号“自相关”的傅里叶变换,但两种情况下自相关的定义是不同的,后者多了对时间区间的平均!能量信号通常持续时间有限,可通过傅里叶变换直接计算能谱,无需借助自相关。功率信号则是无限延伸,通常只能通过有限时间的观测对其功率谱进行估计,在平稳随机过程中,可借助截断信号的傅里叶变换(周期图法),也可借助截断信号自相关的傅里叶变换(自相关法)。
傅里叶变换是针对无限区间的,因此这里讨论的信号都是无限延伸的。现实中观测时长有限,记录到的信号严格讲都属于能量信号,但只要持续时间相较于观测时间足够长,通常都会计算功率谱而非能谱。此时不必取极限,直接用信号实际持续时长T T T
S ( f ) = 1 T ∣ X ( f ) ∣ 2 S(f) = \frac{1}{T} |X(f)|^2
S ( f ) = T 1 ∣ X ( f ) ∣ 2
这里其实是将信号视为以T T T
量纲分析 x ( t ) x(t) x ( t ) V V V
E = ∫ ∣ x ( t ) ∣ 2 d t , P = E T E = \int |x(t)|^2 dt, ~~~ P = \frac{E}{T}
E = ∫ ∣ x ( t ) ∣ 2 d t , P = T E
在量纲上[ E ] = [ x ] 2 [ t ] , [ P ] = [ x ] 2 [E] = [x]^2[t], [P] = [x]^2 [ E ] = [ x ] 2 [ t ] , [ P ] = [ x ] 2 V 2 s V^2 s V 2 s V 2 Hz − 1 V^2 \text{Hz}^{-1} V 2 Hz − 1 V 2 V^2 V 2 Hz \text{Hz} Hz Hz \text{Hz} Hz V 2 Hz − 2 V^2 \text{Hz}^{-2} V 2 Hz − 2 V 2 Hz − 1 V^2 \text{Hz}^{-1} V 2 Hz − 1
X ( f ) = ∫ x ( t ) e − i 2 π f t d t X(f) = \int x(t) e^{-i 2\pi f t} dt
X ( f ) = ∫ x ( t ) e − i 2 π f t d t
在量纲上[ X ] = [ x ] [ t ] [X] = [x][t] [ X ] = [ x ] [ t ] X ( f ) X(f) X ( f ) V s V s V s V Hz − 1 V \text{Hz}^{-1} V Hz − 1 [ E ] = [ x ] 2 [ t ] = [ X ] 2 [ f ] [E] = [x]^2[t] = [X]^2[f] [ E ] = [ x ] 2 [ t ] = [ X ] 2 [ f ] [ S E ] = [ X ] 2 [S_E]=[X]^2 [ S E ] = [ X ] 2 [ S ] = [ X ] 2 [ t ] − 1 [S]=[X]^2[t]^{-1} [ S ] = [ X ] 2 [ t ] − 1
最终总结起来有:
时域信号 x ( t ) x(t) x ( t )
总能量 E E E
频谱 X ( f ) X(f) X ( f )
功率/离散功率谱 P , P ( f k ) P, P(f_k) P , P ( f k )
能谱密度 S E ( f ) S_E(f) S E ( f )
功率谱密度 S ( f ) S(f) S ( f )
幅度谱密度 S A ( f ) S_A(f) S A ( f )
V V V V 2 s V^2 s V 2 s V Hz − 1 V~\text{Hz}^{-1} V Hz − 1 V 2 V^2 V 2 V 2 s Hz − 1 V^2 s~\text{Hz}^{-1} V 2 s Hz − 1 V 2 Hz − 1 V^2~\text{Hz}^{-1} V 2 Hz − 1 V / Hz V/\sqrt{\text{Hz}} V / Hz
注1:前面提到,对于各态经历的随机过程,功率在数学上其实对应于随机信号的方差,相应的在量纲上[ P ] = [ x ] 2 [P]=[x]^2 [ P ] = [ x ] 2
注2:这里以电压信号为例,V V V V V V m m m m s − 1 ms^{-1} m s − 1 Hz − 1 \text{Hz}^{-1} Hz − 1 s s s Hz \text{Hz} Hz
注3:工程上绘制功率谱时,一种常见做法是对约化功率取对数,d p = 10 log 10 p p 0 d_p = 10\log_{10} \frac{p}{p_0} d p = 1 0 log 1 0 p 0 p p 0 p_0 p 0 p ′ = 10 log 10 p p' = 10\log_{10} p p ′ = 1 0 log 1 0 p root-power quantity ),分贝值定义为d a = 10 log 10 a 2 a 0 2 = 20 log 10 a a 0 d_a = 10\log_{10} \frac{a^2}{a_0^2} = 20\log_{10} \frac{a}{a_0} d a = 1 0 log 1 0 a 0 2 a 2 = 2 0 log 1 0 a 0 a
注4:这里引入了幅度谱密度(Amplitude Spectral Density, ASD)的概念,被定义为功率谱密度开二次根号S A ( f ) = S ( f ) S_A(f) = \sqrt{S(f)} S A ( f ) = S ( f ) S A ( f ) S_A(f) S A ( f ) A ( f ) A(f) A ( f )
注5:另一个与PSD相关的常见物理量为f S ( f ) fS(f) f S ( f ) f S ( f ) \sqrt{f S(f)} f S ( f ) f f f ∫ S ( f ) f d ln f = ∫ S ( f ) d f \int S(f)f ~ d\ln f = \int S(f) df ∫ S ( f ) f d ln f = ∫ S ( f ) d f
离散序列频谱
DTFT
X 1 T s ( f ) = ∑ − ∞ ∞ x n e − i 2 π f n T s ; X 1 T s ( f ) = ∑ − ∞ ∞ x [ n ] e − i 2 π f n T s X_{\frac{1}{T_s}}(f) = \sum_{-\infty}^{\infty} x_n e^{-i 2\pi f ~ nT_s}; ~~~~~ X_{\frac{1}{T_s}}(f) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi f ~ nT_s}
X T s 1 ( f ) = − ∞ ∑ ∞ x n e − i 2 π f n T s ; X T s 1 ( f ) = − ∞ ∑ ∞ x [ n ] e − i 2 π f n T s
其中T s T_s T s 1 T s \frac{1}{T_s} T s 1 x n = x ( n T s ) x_n = x(nT_s) x n = x ( n T s ) x [ n ] x[n] x [ n ] x n T s x_nT_s x n T s T s T_s T s
∑ n = − ∞ ∞ ∣ x n ∣ 2 = T s ∫ 1 T s ∣ X 1 T s ( f ) ∣ 2 d f \sum_{n=-\infty}^{\infty} |x_n|^2 = T_s\int_\frac{1}{T_s} \left|X_\frac{1}{T_s}(f)\right|^2 df
n = − ∞ ∑ ∞ ∣ x n ∣ 2 = T s ∫ T s 1 ∣ ∣ ∣ ∣ X T s 1 ( f ) ∣ ∣ ∣ ∣ 2 d f
对应于连续信号“能量”定义,离散序列能量和能谱可定义为(T s T_s T s d t dt d t
E = T s ∑ n = − ∞ ∞ ∣ x n ∣ 2 , S ( f ) = T s 2 ∣ X 1 T s ( f ) ∣ 2 E = T_s \sum_{n=-\infty}^{\infty} |x_n|^2, ~~~ S(f) = T_s^2\left|X_\frac{1}{T_s}(f)\right|^2
E = T s n = − ∞ ∑ ∞ ∣ x n ∣ 2 , S ( f ) = T s 2 ∣ ∣ ∣ ∣ X T s 1 ( f ) ∣ ∣ ∣ ∣ 2
在总能量发散时,可基于有限区间[ − N , N ] [-N, N] [ − N , N ]
P = lim N → ∞ 1 ( 2 N + 1 ) T s T s ∑ n = − N N ∣ x n ∣ 2 P = \lim_{N\rightarrow\infty} \frac{1}{(2N+1)T_s} T_s\sum_{n=-N}^{N} |x_n|^2
P = N → ∞ lim ( 2 N + 1 ) T s 1 T s n = − N ∑ N ∣ x n ∣ 2
S ( f ) = lim N → ∞ T s 2 N + 1 ∣ X 2 N + 1 ( f ) ∣ 2 = lim N → ∞ ∣ X 2 N + 1 ( f ) ∣ 2 ( 2 N + 1 ) f s S(f) = \lim_{N\rightarrow\infty} \frac{T_s}{2N+1} \left|X_{2N+1}(f)\right|^2 = \lim_{N\rightarrow\infty} \frac{\left|X_{2N+1}(f)\right|^2}{(2N+1)f_s}
S ( f ) = N → ∞ lim 2 N + 1 T s ∣ X 2 N + 1 ( f ) ∣ 2 = N → ∞ lim ( 2 N + 1 ) f s ∣ X 2 N + 1 ( f ) ∣ 2
由于输入进行了截断,其DTFT不再是无限序列的X 1 T s ( f ) X_\frac{1}{T_s}(f) X T s 1 ( f ) X 2 N + 1 ( f ) X_{2N+1}(f) X 2 N + 1 ( f ) [ − N , N ] [-N, N] [ − N , N ]
DTFT到DFT X 1 T s ( f ) X_{\frac{1}{T_s}}(f) X T s 1 ( f ) X N [ k ] X_N[k] X N [ k ]
X N [ k ] = X 1 T s ( k N T s ) = ∑ − ∞ ∞ x [ n ] e − i 2 π k N n = ∑ n = 0 N − 1 x N [ n ] e − i 2 π k N n X_N[k] = X_{\frac{1}{T_s}}\left(\frac{k}{NT_s}\right) = \sum_{-\infty}^{\infty} x[n] e^{-i 2\pi \frac{k}{N} n} = \sum_{n=0}^{N-1} x_N[n] e^{-i 2\pi \frac{k}{N} n}
X N [ k ] = X T s 1 ( N T s k ) = − ∞ ∑ ∞ x [ n ] e − i 2 π N k n = n = 0 ∑ N − 1 x N [ n ] e − i 2 π N k n
其中x N [ n ] = ∑ m = - ∞ ∞ x n mod N x_N[n]=\sum_{m=\text{-}\infty}^{\infty} x_{n~\text{mod}~N} x N [ n ] = ∑ m = - ∞ ∞ x n mod N { x n } \{x_n\} { x n } N N N { x n } \{x_n\} { x n } x N [ n ] x_N[n] x N [ n ]
下面考虑功率谱的采样,记离散样本总数为L。当L等于N,x N [ n ] x_N[n] x N [ n ] x n x_n x n x N [ n ] x_N[n] x N [ n ] x n x_n x n
P = 1 L T s T s ∑ l = 0 L − 1 ∣ x l ∣ 2 = 1 L ∑ n = 0 N − 1 ∣ x N [ n ] ∣ 2 , S ( f k ) = 1 L f s ∣ X N [ k ] ∣ 2 P = \frac{1}{L T_s} T_s \sum_{l=0}^{L-1} |x_l|^2 = \frac{1}{L} \sum_{n=0}^{N-1} |x_N[n]|^2, ~~~ S(f_k) = \frac{1}{L f_s} |X_N[k]|^2
P = L T s 1 T s l = 0 ∑ L − 1 ∣ x l ∣ 2 = L 1 n = 0 ∑ N − 1 ∣ x N [ n ] ∣ 2 , S ( f k ) = L f s 1 ∣ X N [ k ] ∣ 2
当L大于N,x N [ n ] x_N[n] x N [ n ] x n x_n x n
P = 1 L T s T s ∑ l = 0 L − 1 ∣ x l ∣ 2 = 1 M N ∑ m = 1 M ∑ n = 0 N − 1 ∣ x m , n ∣ 2 = 1 M ∑ m = 1 M 1 N ∑ n = 0 N − 1 ∣ x m , n ∣ 2 P = \frac{1}{L T_s} T_s \sum_{l=0}^{L-1} |x_l|^2 = \frac{1}{MN} \sum_{m=1}^{M} \sum_{n=0}^{N-1} |x_{m,n}|^2 = \frac{1}{M} \sum_{m=1}^{M} \frac{1}{N} \sum_{n=0}^{N-1} |x_{m,n}|^2
P = L T s 1 T s l = 0 ∑ L − 1 ∣ x l ∣ 2 = M N 1 m = 1 ∑ M n = 0 ∑ N − 1 ∣ x m , n ∣ 2 = M 1 m = 1 ∑ M N 1 n = 0 ∑ N − 1 ∣ x m , n ∣ 2
S ( f k ) = 1 M ∑ m = 1 M 1 N f s ∣ X m , k ∣ 2 = 1 M ∑ m = 1 M S ( m ) ( f k ) S(f_k) = \frac{1}{M} \sum_{m=1}^{M} \frac{1}{N f_s} |X_{m,k}|^2 = \frac{1}{M} \sum_{m=1}^{M} S^{(m)}(f_k)
S ( f k ) = M 1 m = 1 ∑ M N f s 1 ∣ X m , k ∣ 2 = M 1 m = 1 ∑ M S ( m ) ( f k )
这里S ( m ) ( f k ) S^{(m)}(f_k) S ( m ) ( f k ) ∣ X N [ k ] ∣ 2 |X_{N}[k]|^2 ∣ X N [ k ] ∣ 2
利用DFT频谱计算功率谱,对应于离散样本的周期性延拓,即周期图法 (periodogram)。应用时有几个变种:
最简单的周期图:直接进行DFT,计算功率谱,对应样本直接延拓
Bartlett法:数据分段后分别DFT,计算功率谱,最后求平均,对应于样本折叠延拓
Welch法:数据分段时可重叠,DFT前加窗,计算功率谱,最后求平均
非均匀采样:Lomb-Scargle周期图,对数据逐点加权
DFT
X k = ∑ n = 0 N − 1 x n e − i 2 π k N n , k ∈ [ 0 , N − 1 ] X_k = \sum_{n=0}^{N-1} x_n e^{-i\frac{2\pi k}{N} n}, k \in [0, N -1]
X k = n = 0 ∑ N − 1 x n e − i N 2 π k n , k ∈ [ 0 , N − 1 ]
在量纲上,对于DFT,[ X k ] = [ x n ] [X_k] = [x_n] [ X k ] = [ x n ]
∑ n = 0 N − 1 ∣ x n ∣ 2 = 1 N ∑ k = 0 N − 1 ∣ X k ∣ 2 \sum_{n=0}^{N-1} |x_n|^2 = \frac{1}{N}\sum_{k=0}^{N-1} |X_k|^2
n = 0 ∑ N − 1 ∣ x n ∣ 2 = N 1 k = 0 ∑ N − 1 ∣ X k ∣ 2
P = 1 N T s T s ∑ n = 0 N − 1 ∣ x n ∣ 2 = 1 N 2 ∑ k = 0 N − 1 ∣ X k ∣ 2 P = \frac{1}{NT_s} T_s\sum_{n=0}^{N-1} |x_n|^2 = \frac{1}{N^2}\sum_{k=0}^{N-1} |X_k|^2
P = N T s 1 T s n = 0 ∑ N − 1 ∣ x n ∣ 2 = N 2 1 k = 0 ∑ N − 1 ∣ X k ∣ 2
注意,离散采样的平均功率为1 N ∑ ∣ x n ∣ 2 \frac{1}{N}\sum |x_n|^2 N 1 ∑ ∣ x n ∣ 2 1 T ∑ ∣ x n ∣ 2 \frac{1}{T}\sum |x_n|^2 T 1 ∑ ∣ x n ∣ 2 s 是参与傅里叶变换的信号实际 长度:DFT计算时会根据指定的nfft对信号补零或截断,这里的N对应于输入序列长度L与nfft中较小者min(L, nftt)。
最终,离散信号基于DFT的功率谱为:
P ( f k ) = ∣ X k N ∣ 2 \boxed{P(f_k) = \left|\frac{X_k}{N}\right|^2}
P ( f k ) = ∣ ∣ ∣ ∣ ∣ N X k ∣ ∣ ∣ ∣ ∣ 2
注意,周期信号对应离散谱,因此这里得到的是离散功率谱而非连续的谱密度。在量纲上[ P ( f k ) ] = [ X k ] 2 = [ x ] 2 [P(f_k)] = [X_k]^2 = [x]^2 [ P ( f k ) ] = [ X k ] 2 = [ x ] 2 α k \alpha_k α k X k N \frac{X_k}{N} N X k P ( f k ) P(f_k) P ( f k )
要估算对应的功率谱密度,需要将功率平均到频率区间1 N T s = f s N \frac{1}{NT_s} = \frac{f_s}{N} N T s 1 = N f s
S ( f k ) = P ( f k ) f s / N = ∣ X k ∣ 2 f s N \boxed{S(f_k) = \frac{P(f_k)}{f_s/N} = \frac{\left|X_k\right|^2 }{f_s N}}
S ( f k ) = f s / N P ( f k ) = f s N ∣ X k ∣ 2
形式上与前面DTFT功率谱密度对应,量纲上[ S ( f k ) ] = [ X k ] 2 [ f ] − 1 [S(f_k)] = [X_k]^2[f]^{-1} [ S ( f k ) ] = [ X k ] 2 [ f ] − 1 X k = X ( f ) T s = X ( f ) f s X_k = \frac{X(f)}{T_s} = X(f)f_s X k = T s X ( f ) = X ( f ) f s 1 T ∣ X ( f ) ∣ 2 = 1 N T s ∣ X ( f ) ∣ 2 = 1 N f s ∣ X k ∣ 2 \frac{1}{T}|X(f)|^2 = \frac{1}{NT_s}|X(f)|^2 = \frac{1}{Nf_s}|X_k|^2 T 1 ∣ X ( f ) ∣ 2 = N T s 1 ∣ X ( f ) ∣ 2 = N f s 1 ∣ X k ∣ 2
最后作为简单示例,考虑单频正弦信号,其功率等于振幅平方的一半:
P f k = 1 2 A f k 2 = ∑ k ′ = 0 N − 1 ∣ X k ′ N ∣ 2 = 2 ∣ X k N ∣ 2 = 2 P ( f k ) , A f k = 2 ∣ X k N ∣ P_{f_{k}} = \frac{1}{2}A_{f_k}^2 = \sum_{k'=0}^{N-1} \left|\frac{X_{k'}}{N}\right|^2 = 2\left|\frac{X_k}{N}\right|^2 = 2P(f_k), ~~~~ A_{f_k} = 2\left|\frac{X_k}{N}\right|
P f k = 2 1 A f k 2 = k ′ = 0 ∑ N − 1 ∣ ∣ ∣ ∣ ∣ N X k ′ ∣ ∣ ∣ ∣ ∣ 2 = 2 ∣ ∣ ∣ ∣ ∣ N X k ∣ ∣ ∣ ∣ ∣ 2 = 2 P ( f k ) , A f k = 2 ∣ ∣ ∣ ∣ ∣ N X k ∣ ∣ ∣ ∣ ∣
求和时只有正负f k f_k f k P ( f k ) P(f_k) P ( f k ) A f k A_{f_k} A f k A ( f k ) = P ( f k ) A(f_k)=\sqrt{P(f_k)} A ( f k ) = P ( f k ) 2 \sqrt{2} 2 2 \sqrt{2} 2
1 2 3 4 5 6 7 8 9 import numpy as npA, freq = 0.5 , 50 fs, N = 1000 , 2000 times = np.arange(N)/fs singal = A*np.sin(2 *np.pi*freq*times) mag = np.abs (np.fft.fft(singal))/N k = int (freq/(fs/N)) print (A, 2 *mag[k])
单边 v.s. 双边 负频率 ,但对于实信号负频率信息是冗余的,其频谱具有共轭对称性,功率谱具有对称性。考虑到在工程实践上,只有正频率具有实际意义,因此很多时候会忽略负频率部分,仅保留单边谱。此时能谱/功率谱需要乘以2,以保证能量守恒。对于复信号频谱不具有上述对称性,也就没有所谓单边谱。
S + ( f ) = { 0 if f < 0 S ( f ) if f = 0 2 S ( f ) if f > 0 S_\text{+}(f) = \begin{cases}
0 ~&\text{if } f<0\\
S(f) ~& \text{if } f=0\\
2S(f) ~& \text{if } f>0
\end{cases} S + ( f ) = ⎩ ⎪ ⎪ ⎨ ⎪ ⎪ ⎧ 0 S ( f ) 2 S ( f ) if f < 0 if f = 0 if f > 0
傅里叶变换将信号拆解为复信号的叠加e i 2 π f t e^{i2\pi f t} e i 2 π f t e i 2 π f t + e − i 2 π f t 2 = R e ( e i 2 π f t ) \frac{e^{i2\pi f t}+e^{-i2\pi f t}}{2} = \mathrm{Re}(e^{i2\pi f t}) 2 e i 2 π f t + e − i 2 π f t = R e ( e i 2 π f t )
而在离散变换中e i 2 π f t = e i 2 π k N f s n T s = e i 2 π k N n e^{i2\pi f t} = e^{i2\pi \frac{k}{N}f_s nT_s} = e^{i2\pi \frac{k}{N} n} e i 2 π f t = e i 2 π N k f s n T s = e i 2 π N k n e i π n = ± 1 e^{i\pi n}=\pm 1 e i π n = ± 1
1 2 3 4 5 6 if mode == 'psd' and sides == 'onesided' : if nfft % 2 : S[1 :] *= 2 else : S[1 :-1 ] *= 2
最后,零频率成分对应信号的时间平均,实际分析时可通过减均值移除DC分量,此外通常会调整采样频率,使Nyquist频率高于关注的信号频段,因此零频率和Nyquist频率的特殊情况影响不大。
窗口修正因子
引入窗口函数后,输入序列由x n ′ x'_n x n ′ w n x n ′ w_n x'_n w n x n ′ X k X_k X k 1 N W k ⊛ X k ′ \frac{1}{N} W_k \circledast X'_k N 1 W k ⊛ X k ′ X k X_k X k X k ′ X'_k X k ′ X k = W 0 N X k ′ X_k = \frac{W_0}{N} X'_k X k = N W 0 X k ′ X k ′ = N W 0 X k X'_k = \frac{N}{W_0} X_k X k ′ = W 0 N X k W 0 W_0 W 0
P ( f k ) = ∣ X k ′ N ∣ 2 = ∣ X k W 0 ∣ 2 P(f_k)=\left|\frac{X'_k}{N}\right|^2 = \left|\frac{X_k}{W_0}\right|^2
P ( f k ) = ∣ ∣ ∣ ∣ ∣ N X k ′ ∣ ∣ ∣ ∣ ∣ 2 = ∣ ∣ ∣ ∣ ∣ W 0 X k ∣ ∣ ∣ ∣ ∣ 2
为了进一步对功率谱密度进行修正,则需要引入“等效噪声带宽”的概念。
等效噪声带宽ENBW (Equivalent Noise BandWidth)
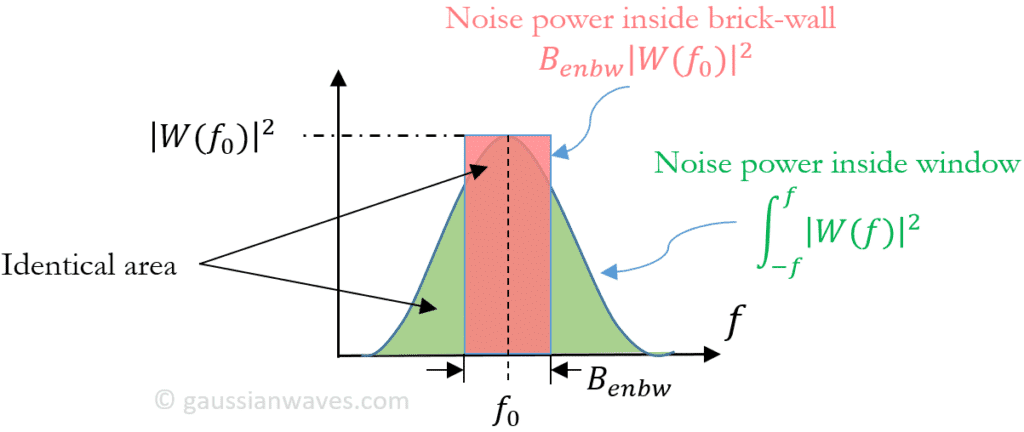
等效噪声宽度ENBW为窗口频率泄露功率所对应的等效频率区间宽度,随机噪声信号在不同窗口函数下的噪声水平就正比于等效噪声宽度。具体的,其定义为窗口函数总功率与功率密度谱峰值的比值,或者总能量与能谱密度峰值的比值。
ENBW ≡ E w i n d o w S E ( f 0 ) = ∫ ∣ w ( t ) ∣ 2 d t ∣ W ( f 0 ) ∣ 2 = ∫ ∣ W ( f ) ∣ 2 d f ∣ W ( f 0 ) ∣ 2 \text{ENBW} \equiv \frac{E_{\rm window}}{S_E(f_0)} = \frac{\displaystyle\int |w(t)|^2 dt}{|W(f_0)|^2} = \frac{\displaystyle\int |W(f)|^2 df}{|W(f_0)|^2}
ENBW ≡ S E ( f 0 ) E w i n d o w = ∣ W ( f 0 ) ∣ 2 ∫ ∣ w ( t ) ∣ 2 d t = ∣ W ( f 0 ) ∣ 2 ∫ ∣ W ( f ) ∣ 2 d f
对于离散窗口,利用DTFT同样有:
ENBW = T s ∑ ∣ w n ∣ 2 T s 2 ∣ W ( f 0 ) ∣ 2 = f s ∑ ∣ w n ∣ 2 ∣ W ( f 0 ) ∣ 2 = ∫ f 0 − f s 2 f 0 + f s 2 ∣ W ( f ) ∣ 2 d f ∣ W ( f 0 ) ∣ 2 \text{ENBW} =\frac{T_s \sum |w_n|^2}{ T_s^2 |W(f_0)|^2} = f_s\frac{\sum |w_n|^2}{|W(f_0)|^2} = \frac{\displaystyle\int_{f_0-\frac{f_s}{2}}^{f_0+\frac{f_s}{2}} |W(f)|^2 df}{|W(f_0)|^2}
ENBW = T s 2 ∣ W ( f 0 ) ∣ 2 T s ∑ ∣ w n ∣ 2 = f s ∣ W ( f 0 ) ∣ 2 ∑ ∣ w n ∣ 2 = ∣ W ( f 0 ) ∣ 2 ∫ f 0 − 2 f s f 0 + 2 f s ∣ W ( f ) ∣ 2 d f
这里f 0 f_0 f 0 W 0 = ∑ w n W_0=\sum w_n W 0 = ∑ w n
ENBW = f s ∑ ∣ w n ∣ 2 ∣ ∑ w n ∣ 2 \boxed{\text{ENBW} = f_s\frac{\sum |w_n|^2}{|\sum w_n|^2} }
ENBW = f s ∣ ∑ w n ∣ 2 ∑ ∣ w n ∣ 2
由于采样频率f s f_s f s f s N \frac{f_s}{N} N f s
ENBW bin = 1 f s / N ENBW = N ∑ ∣ w n ∣ 2 ∣ ∑ w n ∣ 2 \boxed{ \text{ENBW}_\text{bin} = \frac{1}{f_s/N}\text{ENBW} = N \frac{\sum |w_n|^2}{|\sum w_n|^2}}
ENBW bin = f s / N 1 ENBW = N ∣ ∑ w n ∣ 2 ∑ ∣ w n ∣ 2
ENBW bin \text{ENBW}_\text{bin} ENBW bin
最终信号功率谱(密度)的修正为:
功率谱P ( f k ) = ∣ X k W 0 ∣ 2 = ∣ X k ∑ w n ∣ 2 P(f_k) = \left|\frac{X_k}{W_0}\right|^2 = \left|\frac{X_k}{\sum w_n}\right|^2
P ( f k ) = ∣ ∣ ∣ ∣ ∣ W 0 X k ∣ ∣ ∣ ∣ ∣ 2 = ∣ ∣ ∣ ∣ ∣ ∑ w n X k ∣ ∣ ∣ ∣ ∣ 2
对应于矩形窗下有P ( f k ) = ∣ X k N ∣ 2 P(f_k) = \left|\frac{X_k}{N}\right|^2 P ( f k ) = ∣ ∣ ∣ N X k ∣ ∣ ∣ 2
功率谱密度S ( f k ) = P ( f k ) ENBW = ∣ X k ∣ 2 f s ∑ ∣ w n ∣ 2 S(f_k) = \frac{P(f_k)}{\text{ENBW}} = \frac{|X_k|^2}{f_s \sum |w_n|^2}
S ( f k ) = ENBW P ( f k ) = f s ∑ ∣ w n ∣ 2 ∣ X k ∣ 2
对应于矩形窗下有S ( f k ) = P ( f k ) f s / N = ∣ X k ∣ 2 f s N S(f_k) = \frac{P(f_k)}{f_s/N} = \frac{|X_k|^2}{f_s N} S ( f k ) = f s / N P ( f k ) = f s N ∣ X k ∣ 2
最后,相对矩形窗情况,引入窗函数后的修正因子,功率谱为窗函数均值的平方 ( ∑ w n / N ) 2 (\sum w_n / N)^2 ( ∑ w n / N ) 2 ∑ ∣ w n ∣ 2 / N \sum |w_n|^2 / N ∑ ∣ w n ∣ 2 / N
1 2 3 4 5 6 if scaling == 'spectrum' : scale = 1.0 / win.sum ()**2 elif scaling == 'density' : scale = 1.0 / (win**2 ).sum () / fs
Python实现
Numpy :abs, angle, unwrap [fft]fft, fftshift, fftfreq, rfft, rfftfreqScipy :[fft] fft, fftshift, fftfreq, rfft, rfftfreq[signal] welch, csd, periodogram, lombscargle; spectrogram, stftMatplotlib :[pyplot]psd, csd, magnitude|angle|phase_spectrum; specgram
傅里叶变换
fft(x, n=None):n点FFT,根据n对输入补零或截断,默认等于输入序列长度fftfreq(n, d=1.0):基带频率,时域采样间隔d默认为1,对应归一化的频率fftshift(arr):序列前后两半对调,一维序列即np.roll(arr, len(arr)//2)np.abs(x)、np.angle(x)可由fft计算的复频谱获取幅值谱(模)和相位谱(幅角)rfft(x, n=None), rfftfreq(n, d=1.0)可获取实信号的单边复谱及对应基带频率
fft返回的频谱序列对应频率k N f s \frac{k}{N}f_s N k f s [ 0 , f s ) [0, f_s) [ 0 , f s ) [ 0 , 1 2 f s ) ∪ [ − 1 2 f s , 0 ) [0, \frac{1}{2}f_s) \cup [-\frac{1}{2}f_s, 0) [ 0 , 2 1 f s ) ∪ [ − 2 1 f s , 0 ) fftfreq(n)可给出对应的基带频率,[0]为零频率,[1:N//2]为正频率,[N//2:]为负频率。而fftshift(arr)则将序列后半部分调换至序列最前面,fft频谱和fftfreq频率要同时shift,以保持对应,最终频谱序列对应频率区间[ − 1 2 f s , 1 2 f s ) [-\frac{1}{2}f_s, \frac{1}{2}f_s) [ − 2 1 f s , 2 1 f s )
Nyquist频率只有N为偶数时才能取到,因此奇数N实际对应区间( − 1 2 f s , 1 2 f s ) (-\frac{1}{2}f_s, \frac{1}{2}f_s) ( − 2 1 f s , 2 1 f s ) fft频谱[N//2]分量对应Nyquist频率,fftfreq将其值设为− 1 2 f s -\frac{1}{2}f_s − 2 1 f s fftshift将其平移至序列首位。
FFT算法的效率在N为2的指数时最高,因此通常会将n取为256, 512等2的指数。当输入信号为实数可只计算[0:N//2+1]部分,利用频谱共轭对称性获取后半部分,计算时fft会根据输入自动切换至该算法。
功率谱
功率谱 welch, csd, periodogram
时频谱 spectrogram, stft
其他:非均匀采样(lombscargle)、绘图(psd, csd, specgram)
在实现上,功率谱是直接FFT或分段FFT计算功率谱后取平均,时频谱则是分段FFT计算频谱或功率谱,计算时都借助内部函数_spectral_helper。具体的:
peridogram是仅计算单段数据的welch,welch是x,y相等的csd,periodogram不做分段平均,仅考虑 min(nfft, 序列长度) 对应的信号;stft计算复值谱(密度),默认返回离散谱(scaling=‘spectrum’);spectrogram/specgram可返回PSD(默认)、复谱以及幅值、幅角、相位等;plt.psd对应signal.welch,plt.specgram对应signal.spectrogram
参数默认值:
DFT计算长度nfft/pad_to:periodogram为输入序列长度,其余为nperseg
序列切片长度nperseg:窗口长度 或 min(256, 序列长度)
窗口window:periodogram为矩形框’boxcar’,spectrogram为’tukey’,其余为’hann’
重叠noverlap:spectrogram为nperseg//8,其余nperseg//2 (periodogram仅单片段)
修正scaling:stft为离散谱(‘spectrum’),其余均为密度谱(‘density’, scale_by_freq)
趋势移除detrend:stft不处理(False),其余均为扣除均值(‘constant’)
单双边谱:默认都为单边谱return_onesided=True/sides='onesided'(只对实信号有效)
绘图函数默认window为’hann’(对称窗口),noverlap为0,detrend为False
值得注意的,nperseg为实际数据(切片)长度,决定了窗口长度及相关的修正因子 ;nfft为计算FFT的点数,决定了具体的频率值,只有大于数据(切片)长度才有效,小于数据长度时会报错。Matplotlib函数的NFFT参数对应于Scipy的nperseg,pad_to对应后者的nfft,不过目前实现的中存在Bug 。
Matplotlib.pyplot
Scipy.signal
特殊
window'hann’对称窗口
'hann’周期性窗口
signal.periodogram为’boxcar’, signal.spectrogram为’tukey’
noverlap0
nperseg//2plt.specgram为128, signal.periodogram为0, signal.spectrogram为nperseg//8
detrendNone
‘constant’
signal.stft为False
Fs, fs2
1
注意 :
对于实信号,默认都是单边谱,而返回双边谱时,Matplotlib对应fftshift平移后顺序,Scipy则是未平移结果。
Matplotlib函数返回值为正常谱值,但绘图时会自动将谱值变换为分贝值,功率谱对应10 log 10 ( p ) 10\log_{10}(p) 1 0 log 1 0 ( p ) 20 log 10 ( a ) 20\log_{10}(a) 2 0 log 1 0 ( a )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 import numpy as npfrom scipy import signalimport matplotlib.pyplot as pltrng = np.random.default_rng(42 ) fs = 1000 f = 100 t = np.arange(0 , 1 , 1 /fs) s = np.sin(2 * np.pi * f * t) + 0.5 * rng.normal(size=t.shape) nfft = 512 fig, axes = plt.subplots(2 , 1 , sharex=True ) psd, freqs = axes[0 ].psd(s, NFFT=512 , Fs=fs) freqs1, psd1 = signal.welch(s, nperseg=512 , fs=fs) axes[0 ].plot(freqs1, 10 *np.log10(psd1)) relative_error = np.abs ( 2 * (psd-psd1)/(psd + psd1) ) axes[1 ].plot(freqs, relative_error) axes[1 ].set_ylabel('relative error' ) plt.show() fig, axes = plt.subplots(2 , 1 , sharex=True ) psd, freqs = axes[0 ].psd(s, NFFT=512 , Fs=fs) freqs1, psd1 = signal.welch(s, nperseg=512 , fs=fs, detrend=False , noverlap=0 ) axes[0 ].plot(freqs1, 10 *np.log10(psd1)) relative_error = np.abs ( 2 * (psd-psd1)/(psd + psd1) ) axes[1 ].plot(freqs, relative_error) axes[1 ].set_ylabel('relative error' ) plt.show() win = signal.windows.hann(512 ) fig, axes = plt.subplots(2 , 1 , sharex=True ) psd, freqs = axes[0 ].psd(s, NFFT=512 , Fs=fs) freqs1, psd1 = signal.welch(s, nperseg=512 , fs=fs, detrend=False , noverlap=0 , window=win) axes[0 ].plot(freqs1, 10 *np.log10(psd1)) relative_error = np.abs ( 2 * (psd-psd1)/(psd + psd1) ) axes[1 ].plot(freqs, relative_error) axes[1 ].set_ylabel('relative error' ) plt.show() fig, axes = plt.subplots(2 , 1 , sharex=True ) psd, freqs = axes[0 ].psd(s, NFFT=512 , Fs=fs, sides='twosided' ) freqs1, psd1 = signal.welch(s, nperseg=512 , fs=fs, detrend=False , noverlap=0 , return_onesided=False , window=win) axes[0 ].plot(freqs1, 10 *np.log10(psd1)) psd1 = np.fft.fftshift(psd1) relative_error = np.abs ( 2 * (psd-psd1)/(psd + psd1) ) axes[1 ].plot(freqs, relative_error) axes[1 ].set_ylabel('relative error' ) plt.show()
调制
最简单的例子,假设载波信号为c ( t ) = A 0 cos ( ω 0 t + ϕ 0 ) c(t) = A_0 \cos(\omega_0 t + \phi_0) c ( t ) = A 0 cos ( ω 0 t + ϕ 0 )
调幅AM:A = s ( t ) A 0 A = s(t)A_0 A = s ( t ) A 0 x ( t ) = s ( t ) A 0 cos ( ω 0 t + ϕ 0 ) = s ( t ) c ( t ) x(t) = s(t)A_0 ~ \cos(\omega_0 t + \phi_0) = s(t)c(t) x ( t ) = s ( t ) A 0 cos ( ω 0 t + ϕ 0 ) = s ( t ) c ( t )
调频FM:ω = ω 0 + 2 π f Δ s ( t ) \omega = \omega_0 + 2\pi f_{\Delta}s(t) ω = ω 0 + 2 π f Δ s ( t ) x ( t ) = A 0 cos ( ω 0 t + 2 π f Δ ∫ 0 t s ( τ ) d τ + ϕ 0 ) x(t) = A_0\cos\left(\omega_0t + 2\pi f_{\Delta}\int_0^t s(\tau)d\tau + \phi_0\right) x ( t ) = A 0 cos ( ω 0 t + 2 π f Δ ∫ 0 t s ( τ ) d τ + ϕ 0 )
调相PM:ϕ = ϕ 0 + s ( t ) \phi = \phi_0 + s(t) ϕ = ϕ 0 + s ( t ) x ( t ) = A 0 cos ( ω 0 t + s ( t ) + ϕ 0 ) x(t) = A_0\cos\big(\omega_0t + s(t) + \phi_0 \big) x ( t ) = A 0 cos ( ω 0 t + s ( t ) + ϕ 0 )
卷积相关 Conv & Corr
卷积与相关
( f ⋆ g ) ( τ ) = ∫ − ∞ ∞ f ( t ) ‾ g ( t + τ ) d t v.s. ( f ∗ g ) ( τ ) = ∫ − ∞ ∞ f ( t ) g ( τ − t ) d t (f \star g)(\tau) = \int_{-\infty}^{\infty} \overline{f(t)}~g(t+\tau)dt ~~~~~ \text{v.s.} ~~~~~ (f * g)(\tau) = \int_{-\infty}^{\infty} f(t)~g(\tau-t)dt
( f ⋆ g ) ( τ ) = ∫ − ∞ ∞ f ( t ) g ( t + τ ) d t v.s. ( f ∗ g ) ( τ ) = ∫ − ∞ ∞ f ( t ) g ( τ − t ) d t
互相关的定义式是希尔伯特空间中的函数内积,取共轭是内积所必须的 ,也保证了函数与自身内积为正实数。据此,相关可视为两个无限长向量的“滑动点积”,而点积反映了向量相似度。因此相关的直观意义很明确,就是度量两个序列(函数)在不同位移量下的相似度,可用于序列的特征检测:比如通过与已知信号互相关检测序列中的特定模式,又或者通过序列的自相关揭示内在周期性。
卷积与相关核心区别在于在“滑动点积”前多了反转操作(同时也无需取共轭)。可视作f ( t ) f(t) f ( t ) g ( − t ) g(-t) g ( − t ) g ( − t ) g(-t) g ( − t ) f ( t ) f(t) f ( t ) g ( t ) g(t) g ( t ) τ \tau τ t t t f ( t ) d t f(t)dt f ( t ) d t f ( t ) g ( τ − t ) d t f(t)g(\tau-t)dt f ( t ) g ( τ − t ) d t τ \tau τ t t t f ( τ − t ) d t f(\tau-t)dt f ( τ − t ) d t f ( τ − t ) g ( t ) d t f(\tau-t)g(t)dt f ( τ − t ) g ( t ) d t τ \tau τ
∫ − ∞ τ f ( t ) g ( τ − t ) d t = ∫ 0 ∞ f ( τ − t ) g ( t ) d t \int_{-\infty}^{\tau} f(t)g(\tau-t) dt = \int_{0}^{\infty} f(\tau-t)g(t) dt
∫ − ∞ τ f ( t ) g ( τ − t ) d t = ∫ 0 ∞ f ( τ − t ) g ( t ) d t
假设g ( t ) = 0 , t < 0 g(t)=0, t<0 g ( t ) = 0 , t < 0
∫ − ∞ ∞ f ( t ) g ( τ − t ) d t = ∫ − ∞ ∞ f ( τ − t ) g ( t ) d t \int_{-\infty}^{\infty} f(t)g(\tau-t) dt = \int_{-\infty}^{\infty} f(\tau-t)g(t) dt
∫ − ∞ ∞ f ( t ) g ( τ − t ) d t = ∫ − ∞ ∞ f ( τ − t ) g ( t ) d t
这就是卷积f ( t ) ∗ g ( t ) f(t) * g(t) f ( t ) ∗ g ( t ) g ( t ) = 0 , t < 0 g(t)=0, t<0 g ( t ) = 0 , t < 0 t t t
具体的,以背单词为例,假设时间d t dt d t f ( t ) d t f(t)dt f ( t ) d t g ( t ) g(t) g ( t ) τ \tau τ t t t f ( t ) d t f(t)dt f ( t ) d t f ( t ) g ( τ − t ) d t f(t)g(\tau-t)dt f ( t ) g ( τ − t ) d t ∫ − ∞ τ f ( t ) g ( τ − t ) d t \int_{-\infty}^{\tau} f(t)g(\tau-t)dt ∫ − ∞ τ f ( t ) g ( τ − t ) d t g ( t ) g(t) g ( t ) g ( t ) g(t) g ( t )
除了上述“输入影响的持续累积”,卷积还有其它很多不同视角:
若将g ( t ) g(t) g ( t )
在概率论中,假设独立随机变量x , y \mathbf{x}, \mathbf{y} x , y f ( t ) , g ( t ) f(t), g(t) f ( t ) , g ( t ) x + y \mathbf{x+y} x + y f ∗ g f*g f ∗ g y − x \mathbf{y-x} y − x f ⋆ g f\star g f ⋆ g
与上述结论密切相关的一个视角 是,设平面坐标系( t 1 , t 2 ) (t_1, t_2) ( t 1 , t 2 ) f ( t 1 ) g ( t 2 ) f(t_1)g(t_2) f ( t 1 ) g ( t 2 ) t 1 = τ − t 2 t_1=\tau-t_2 t 1 = τ − t 2 t 1 = τ + t 2 t_1=\tau+t_2 t 1 = τ + t 2
利用卷积定理,F { f ∗ g } = F { f } F { g } \mathcal{F}\{f * g\} = \mathcal{F}\{f\}\mathcal{F}\{g\} F { f ∗ g } = F { f } F { g }
对于信号处理系统,f ( t ) f(t) f ( t ) g ( t ) g(t) g ( t )
根据微分性质,( f ∗ g ) ′ = f ′ ∗ g = f ∗ g ′ (f * g)' = f' * g = f * g' ( f ∗ g ) ′ = f ′ ∗ g = f ∗ g ′ f ∗ g f*g f ∗ g f f f g g g f ∗ g f*g f ∗ g f , g f, g f , g f f f g g g f ∗ g f * g f ∗ g f f f f f f f ∗ g ′ f*g' f ∗ g ′
对于对称实信号,或一般的哈密顿函数f ( t ) ‾ = f ( − t ) \overline{f(t)} = f(-t) f ( t ) = f ( − t ) f f f f ∗ g = g ∗ f = f ⋆ g f*g = g*f = f\star g f ∗ g = g ∗ f = f ⋆ g g g g f ∗ g = g ∗ f = g ⋆ f f*g = g*f = g\star f f ∗ g = g ∗ f = g ⋆ f
卷积在实践中很常见,不同应用下的具体意义关联性可能不大,可在具体应用场景中去理解,不必强求统一的直观理解。事实上,任何数据测量过程都可理解为测量系统对于实际信号的响应。而如果系统响应是线性的,测量结果就对应于信号与系统响应函数的卷积。考虑到观测精度的限制,卷积将在数据中引入测量误差,需要在后续处理中通过滤波等手段提升信噪比。以天文观测为例,地面观测会受到大气湍流的干扰,观测到的天体亮度分布就是实际亮度与大气视宁度的卷积;而空间观测同样会受到镜片衍射极限的限制,观测到的亮度是实际亮度与望远镜衍射图样的卷积。
互相关不满足交换律(以及结合律)f ⋆ g ≠ g ⋆ f f \star g \neq g \star f f ⋆ g = g ⋆ f F { f ⋆ g } = F { g ⋆ f } ‾ \mathcal{F}\{f \star g\} = \overline{\mathcal{F}\{g \star f\}} F { f ⋆ g } = F { g ⋆ f }
f ( t ) ∗ g ( t ) = f ( − t ) ‾ ⋆ g ( t ) , f ( t ) ⋆ g ( t ) = f ( − t ) ‾ ∗ g ( t ) f(t) * g(t) = \overline{f(-t)} \star g(t), ~~~ f(t) \star g(t) = \overline{f(-t)} * g(t) f ( t ) ∗ g ( t ) = f ( − t ) ⋆ g ( t ) , f ( t ) ⋆ g ( t ) = f ( − t ) ∗ g ( t ) f ⋆ ( g ∗ h ) = ( f ⋆ g ) ∗ h f \star (g * h) = (f \star g) * h f ⋆ ( g ∗ h ) = ( f ⋆ g ) ∗ h 卷积性质
交换律 f ∗ g = g ∗ f f * g = g * f f ∗ g = g ∗ f
结合律 f ∗ ( g ∗ h ) = ( f ∗ g ) ∗ h f * (g * h) = (f * g) * h f ∗ ( g ∗ h ) = ( f ∗ g ) ∗ h
分配律 f ∗ ( g + h ) = f ∗ g + f ∗ h f * (g + h)= f * g + f * h f ∗ ( g + h ) = f ∗ g + f ∗ h
单位元 f ∗ δ = δ ∗ f = f f * \delta = \delta * f = f f ∗ δ = δ ∗ f = f
时移 f ( t + a ) ∗ g ( t + b ) = ( f ∗ g ) ( t + a + b ) f(t + a) * g(t + b) = (f*g)(t + a + b) f ( t + a ) ∗ g ( t + b ) = ( f ∗ g ) ( t + a + b )
缩放 f ( a t ) ∗ g ( a t ) = 1 ∣ a ∣ ( f ∗ g ) ( a t ) f(at) * g(at) = \frac{1}{|a|}(f*g)(at) f ( a t ) ∗ g ( a t ) = ∣ a ∣ 1 ( f ∗ g ) ( a t )
微分 ( f ∗ g ) ′ = f ′ ∗ g = f ∗ g ′ (f * g)' = f' * g = f * g' ( f ∗ g ) ′ = f ′ ∗ g = f ∗ g ′
积分 ∫ f ∗ g d t = [ ∫ f ( t ) d t ] [ ∫ g ( t ) d t ] \int f*g dt = [\int f(t) dt][\int g(t) dt] ∫ f ∗ g d t = [ ∫ f ( t ) d t ] [ ∫ g ( t ) d t ]
卷积定理 F { f ∗ g } = F { f } F { g } , F { f g } = F { f } ∗ F { g } \mathcal{F}\{f * g\} = \mathcal{F}\{f\}\mathcal{F}\{g\}, ~~~ \mathcal{F}\{f g\} = \mathcal{F}\{f\}*\mathcal{F}\{g\} F { f ∗ g } = F { f } F { g } , F { f g } = F { f } ∗ F { g }
高斯函数的卷积仍是高斯函数,N ( μ 1 , σ 1 ) , N ( μ 2 , σ 2 ) \mathcal{N}(\mu_1, \sigma_1), \mathcal{N}(\mu_2, \sigma_2) N ( μ 1 , σ 1 ) , N ( μ 2 , σ 2 ) N ( μ 1 + μ 2 , σ 1 2 + σ 2 2 ) \mathcal{N}(\mu_1+\mu_2, \sqrt{\sigma_1^2+\sigma_2^2}) N ( μ 1 + μ 2 , σ 1 2 + σ 2 2 )
相关与功率谱
r x x ( τ ) = x ( t ) ⋆ x ( t ) = ∫ − ∞ ∞ x ( t ) ‾ x ( t + τ ) d t r_{xx}(\tau ) = x(t) \star x(t) = \int_{-\infty}^{\infty} \overline{x(t)}~x(t+\tau)dt
r x x ( τ ) = x ( t ) ⋆ x ( t ) = ∫ − ∞ ∞ x ( t ) x ( t + τ ) d t
上述定义仅对能量信号有意义(积分收敛),对于功率信号自相关定义为:
r x x ( τ ) = lim T → ∞ x T ( t ) ⋆ x T ( t ) T = lim T → ∞ 1 T ∫ − T / 2 T / 2 x ( t ) ‾ x ( t + τ ) d t r_{xx}(\tau )= \lim _{T\rightarrow \infty }{\frac {x_T(t) \star x_T(t)}{T}} = \lim _{T\rightarrow \infty } \frac{1}{T} \int_{-T/2}^{T/2} \overline{x(t)}x(t+\tau ) ~ dt
r x x ( τ ) = T → ∞ lim T x T ( t ) ⋆ x T ( t ) = T → ∞ lim T 1 ∫ − T / 2 T / 2 x ( t ) x ( t + τ ) d t
自相关反映了序列在不同位移量下的相似度,为实对称函数,且零点值最大r ( τ ) ≤ r ( 0 ) r(\tau) \le r(0) r ( τ ) ≤ r ( 0 ) r x x r_{xx} r x x 信号分析II:随机过程 。
类似于自相关与功率谱,可定义功率信号的互相关及对应的互功率谱:
r x y ( τ ) = lim T → ∞ x T ( t ) ⋆ y T ( t ) T = lim T → ∞ 1 T ∫ − T / 2 T / 2 x ( t ) ‾ y ( t + τ ) d t r_{xy}(\tau )= \lim _{T\rightarrow \infty }{\frac {x_T(t) \star y_T(t)}{T}} = \lim _{T\rightarrow \infty } \frac{1}{T} \int_{-T/2}^{T/2} \overline{x(t)}y(t+\tau ) ~ dt
r x y ( τ ) = T → ∞ lim T x T ( t ) ⋆ y T ( t ) = T → ∞ lim T 1 ∫ − T / 2 T / 2 x ( t ) y ( t + τ ) d t
S x y ( f ) = F { r x y ( τ ) } = ∫ r x y ( τ ) e − i 2 π f τ d τ S_{xy}(f) = \mathcal{F}\{ r_{xy}(\tau)\} = \int r_{xy}(\tau) e^{-i2\pi f \tau} d\tau
S x y ( f ) = F { r x y ( τ ) } = ∫ r x y ( τ ) e − i 2 π f τ d τ
需要注意,由于相关不具有对称性,因此r x y r_{xy} r x y r y x r_{yx} r y x S x y ( f ) S_{xy}(f) S x y ( f ) S y x ( f ) S_{yx}(f) S y x ( f )
需要注意的,这里讨论的相关不同于概率论中的“相关”,后者通常指随机变量的(皮尔逊)相关系数ρ ( X , Y ) = c o v ( X , Y ) σ X σ Y \rho(X,Y) = \frac{\mathrm{cov}(X, Y)}{\sigma_X \sigma_Y} ρ ( X , Y ) = σ X σ Y c o v ( X , Y ) ρ X , Y ( τ ) = c o v X , Y ( τ ) σ X σ Y \rho_{X,Y}(\tau) = \frac{\mathrm{cov}_{X, Y}(\tau)}{\sigma_X \sigma_Y} ρ X , Y ( τ ) = σ X σ Y c o v X , Y ( τ ) 信号分析II:随机过程 。
离散实现
( x ⋆ y ) [ k ] = ∑ n = − ∞ ∞ x [ n ] ‾ y [ n + k ] v.s. ( x ∗ y ) [ k ] = ∑ n = − ∞ ∞ x [ n ] y [ k − n ] (x\star y)[k] = \sum _{n=-\infty}^{\infty}\overline{x[n]}y[n+k] ~~~ \text{v.s.} ~~~ (x*y)[k] = \sum _{n=-\infty}^{\infty}x[n]y[k-n]
( x ⋆ y ) [ k ] = n = − ∞ ∑ ∞ x [ n ] y [ n + k ] v.s. ( x ∗ y ) [ k ] = n = − ∞ ∑ ∞ x [ n ] y [ k − n ]
对于有限长度的序列,取x , y x, y x , y N , M N, M N , M
( x ⋆ y ) [ k ] = ∑ n = 0 N − 1 x [ n ] ‾ y [ n + k ] , k ∈ [ − ( N − 1 ) , M − 1 ] ( x ∗ y ) [ k ] = ∑ n = 0 N − 1 x [ n ] y [ k − n ] , k ∈ [ 0 , N + M − 2 ] \begin{aligned}
(x\star y)[k] =& \sum _{n=0}^{N-1}\overline{x[n]}y[n+k], k \in [-(N-1), M-1] \\
(x*y)[k] =& \sum _{n=0}^{N-1}x[n]y[k-n], k \in [0, N+M-2]
\end{aligned} ( x ⋆ y ) [ k ] = ( x ∗ y ) [ k ] = n = 0 ∑ N − 1 x [ n ] y [ n + k ] , k ∈ [ − ( N − 1 ) , M − 1 ] n = 0 ∑ N − 1 x [ n ] y [ k − n ] , k ∈ [ 0 , N + M − 2 ]
计算时,当指标超出序列y y y k k k k ′ = k + ( N − 1 ) k'= k+(N-1) k ′ = k + ( N − 1 ) y ext y_\text{ext} y ext y y y N − 1 N-1 N − 1
z [ k ] = ( x ⋆ y ext ) [ k ] = ∑ n = 0 N − 1 x [ n ] ‾ y ext [ n + k ] , k ∈ [ 0 , N + M − 2 ] z[k] = (x\star y_\text{ext})[k] = \sum _{n=0}^{N-1}\overline{x[n]}y_\text{ext}[n+k], k \in [0, N+M-2]
z [ k ] = ( x ⋆ y ext ) [ k ] = n = 0 ∑ N − 1 x [ n ] y ext [ n + k ] , k ∈ [ 0 , N + M − 2 ]
而卷积同样可变换为相关:
( x ∗ y ) [ k ] = ( x ‾ invert ⋆ y ext ) [ k ] , k ∈ [ 0 , N + M − 2 ] (x*y)[k] = (\overline{x}_\text{invert}\star y_\text{ext})[k], k \in [0, N+M-2]
( x ∗ y ) [ k ] = ( x invert ⋆ y ext ) [ k ] , k ∈ [ 0 , N + M − 2 ]
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 import numpy as npdef xcorr (x, y ): N, M = len (x), len (y) dtype = 'float' if np.iscomplexobj(x) or np.iscomplexobj(y): dtype='complex' zero_ext = np.zeros(N-1 ) y_ext = np.r_[zero_ext, y, zero_ext] z = np.zeros(M+N-1 , dtype=dtype) for k in range (M+N-1 ): z[k] = np.sum (np.conj(x) * y_ext[k:k+N]) return z def conv (x, y ): return xcorr(np.conj(x[::-1 ]), y)
Python中相关和卷积的基本实现有:
Numpy :correlate, convolve Scipy :[signal] correlate, convolveMatplotlib :acorr, xcorr
需要注意的是,在上述实现中互相关(correlate)的定义为∑ m x m + k y m ‾ \sum _{m} x_{m+k} \overline{y_{m}} ∑ m x m + k y m ( y ⋆ x ) [ k ] (y\star x)[k] ( y ⋆ x ) [ k ] x , y x, y x , y
1 2 3 4 5 from scipy import signal x = [1 , 2 +1j , 3 ] y = [0 , 1 , 2 , 3 -1j , 4 ] print (xcorr(y, x), '\n' , np.correlate(x, y, 'full' ),'\n' , signal.correlate(x, y))print (conv(y, x), '\n' , np.convolve(x, y), '\n' , signal.convolve(x, y))
相关和卷积计算时有三种模式:‘full’、‘valid’和’same’:
'full’是最常见,计算所有存在重叠的情况,最终输出序列长度为N+M-1,循环卷积的单个周期就回归了普通卷积。因此,对于离散信号只要适当补零,即可;
'valid’只计算序列完全重叠的部分,输出序列长度为max(M, N) - min(M, N) + 1,这种模式下无需补零,对于相同长度序列结果只有一个值;
'same’介于full与valid之间,Numpy中定义为输出长度等于较长序列max(M, N),而在Scipy中则是与前一序列长度相同。默认情况下,除了Numpy卷积为’valid’模式,其余均为’full’模式。
上述相关和卷积操作,超出序列范围时取值默认为0,被称为线性卷积。另一种做法是对序列进行周期性延拓,对应单个周期内的结果被称为循环卷积,这样定义的好处是服从DFT变换下的卷积定理。而通过简单的补零延拓,循环卷积可回归至线性卷积,最终可通过FFT计算线性卷积。事实上,在上述实现中,序列较长时会自动切换至基于FFT的算法。
周期卷积与循环卷积 周期性卷积 (periodic convolution):
∫ t 0 t 0 + T f T ( τ ) g T ( t − τ ) d τ = ∫ 0 T f T ( τ ) g T ( t − τ ) d τ \int_{t_0}^{t_0 + T} f_T(\tau) g_T(t-\tau) d\tau = \int_{0}^{T} f_T(\tau) g_T(t-\tau) d\tau
∫ t 0 t 0 + T f T ( τ ) g T ( t − τ ) d τ = ∫ 0 T f T ( τ ) g T ( t − τ ) d τ
而有限区间非零的函数通过周期性延拓可得到周期性函数,进而计算周期性卷积,被称为延拓前函数的循环卷积 :设周期T T T f ( t ) , g ( t ) f(t), g(t) f ( t ) , g ( t ) f T ( t ) ≡ f ( t mod T ) f_T(t) \equiv f \bigl( t~\text{mod}~T \bigr) f T ( t ) ≡ f ( t mod T ) f ( t ) f(t) f ( t ) f , g f, g f , g f T , g T f_T, g_T f T , g T
f ⊛ g = ∫ t 0 t 0 + T f T ( τ ) g T ( t − τ ) d τ = ∫ − ∞ ∞ f ( τ ) g T ( t − τ ) d τ = f ∗ g T f \circledast g = \int_{t_0}^{t_0+T} f_T(\tau) g_T(t-\tau) d\tau = \int_{-\infty}^{\infty} f(\tau) g_T(t-\tau) d\tau = f*g_T
f ⊛ g = ∫ t 0 t 0 + T f T ( τ ) g T ( t − τ ) d τ = ∫ − ∞ ∞ f ( τ ) g T ( t − τ ) d τ = f ∗ g T
离散形式有(取周期性延拓区间长度为L L L
x ⊛ y = ∑ l = 0 L − 1 x [ l ] y L [ n − l ] = ∑ l = 0 L − 1 x l y ( n − l ) mod L x \circledast y = \sum_{l=0}^{L-1} x[l]~y_L[n-l] = \sum_{l=0}^{L-1} x_{\tiny l}~y_{_{(n-l)~\text{mod}~L}}
x ⊛ y = l = 0 ∑ L − 1 x [ l ] y L [ n − l ] = l = 0 ∑ L − 1 x l y ( n − l ) mod L
(线性)卷积 v.s. 循环卷积:设序列 x , y x, y x , y x ∗ y = ∑ l x l y n − l x \ast y = \sum_l x_{\tiny l}~y_{_{n-l}} x ∗ y = ∑ l x l y n − l x ⊛ y = ∑ l = 0 L − 1 x l y ( n − l ) mod L x \circledast y = \sum_{l=0}^{L-1} x_{\tiny l}~y_{_{(n-l)~\text{mod}~L}} x ⊛ y = ∑ l = 0 L − 1 x l y ( n − l ) mod L 利用FFT快速计算卷积 。
线性滤波
滤波器或过滤器(filter)是用于移除或抑制输入信号部分成分、提取或凸显目标成分的算法或模块。如耳机的降噪、图片的抠像,又或者去除时序信号中的周期性波动、线性偏置等。从不同角度可分为线性与非线性、时变与时不变、因果与非因果等。这里简单解释下因果性,以时列信号处理为例,常见的应用场景有:
过滤:利用当前及之前含噪声的观测数据,估计当前信号值
预测:利用当前及之前含噪声的观测数据,估计未来信号值
平滑:利用过去及未来含噪声的观测数据,估计当前信号值
这其中,前两者处理时只利用过往及当前数据,符合因果律限制,为因果滤波,最后一种情况利用了未来数据,属于非因果滤波。显然对于时序信号,因果滤波可实时运行,而非因果滤波不行。
下面主要关注最简单的线性时不变滤波器。对于线性时不变系统,其作用可通过“卷积”描述y ( t ) = h ( t ) ∗ x ( t ) y(t) = h(t) * x(t) y ( t ) = h ( t ) ∗ x ( t ) h ( t ) h(t) h ( t )
Y ( f ) = H ( f ) X ( f ) Y(f) = H(f)X(f)
Y ( f ) = H ( f ) X ( f )
其中H ( f ) H(f) H ( f ) h ( t ) h(t) h ( t ) ∣ H ( f ) ∣ |H(f)| ∣ H ( f ) ∣
低通(highpass)滤波:仅低频成分通过,低频增益为1,高频为0(或接近0)
高通(lowpass)滤波:仅高频成分通过,高频增益为1,低频为0
带通(bandpass)滤波:仅特定频带通过,特定频带增益为1,其余为0
带阻(bandstop)滤波:特定频带不通过,特定频带增益为0,其余为1
全通(allpass)滤波:所有频带增益都为1,常用于调整信号的相位
注意,虽然对于线性时不变的滤波系统,基于卷积定理,频域角度的理解和计算都很直观。但频域视角并非必要的,有时候也并不比时域/空域更直观,比如图片的抠像。
下面通过高斯函数来直观理解低通和高通滤波的时域效果。高斯函数FT为其自身,以e − π f 2 e^{-\pi f^2} e − π f 2 e − π x 2 e^{-\pi x^2} e − π x 2 1 − e − π f 2 1-e^{-\pi f^2} 1 − e − π f 2 δ ( x ) − e − π x 2 \delta(x) - e^{-\pi x^2} δ ( x ) − e − π x 2 y n = a n y_n = a n y n = a n y n − y n − 1 = a y_n-y_{n-1} = a y n − y n − 1 = a
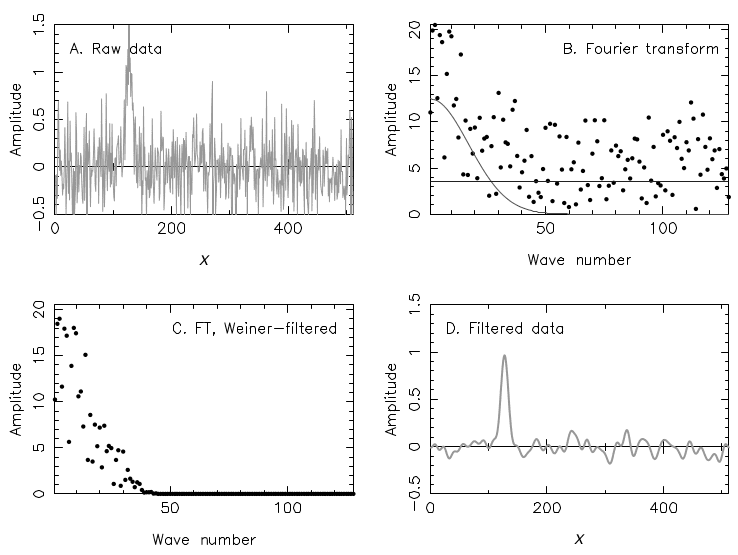
在具体应用上,现实观测数据总是存在随机噪声,假设噪声为白噪声,则其频谱为常数,覆盖所有频段,如果信号集中在低频,就可以通过忽略高频部分,降低噪声的占比。对广义平稳过程,基于均方误差最小可得到(维纳滤波):
H ( f ) = S s ( f ) S ( f ) = S s ( f ) S s ( f ) + S n ( f ) H(f) = \frac{S_s(f)}{S(f)} = \frac{S_s(f)}{S_s(f) + S_n(f)}
H ( f ) = S ( f ) S s ( f ) = S s ( f ) + S n ( f ) S s ( f )
这里假设观测数据为信号+零均值噪声,两者广义平稳且相互独立。S ( f ) , S s ( f ) , S n ( f ) S(f), S_s(f), S_n(f) S ( f ) , S s ( f ) , S n ( f )
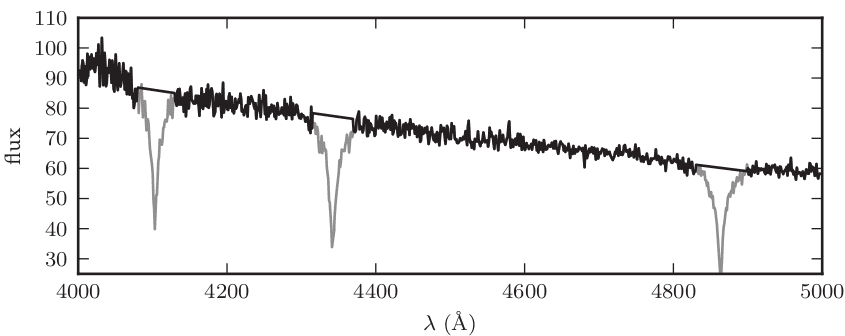
此外,很多时间序列会呈现出整体性的趋势,如线性偏置或缓慢波动,对应于低频信号,因此这种整体趋势的移除(detrend)属于高通滤波。如下图所示的光谱,由整体倾斜的连续谱(基线)和几个吸收谱线组成。考虑到吸收峰的类高斯形状,其功率也集中在低频,因此简单的频域窗口函数并不可行。通常的做法是忽略(mask)吸收峰部分,用线性或低阶多项式拟合剩余部分(黑色),最后扣除拟合基线,即可保留信号峰,实现高通滤波。此外,也可以对基线和信号峰一起进行参数估计,如MCMC等采样算法。
需要强调的是,虽然滤波可实现数据的降噪或信噪比提升,但数据中的信息通常是有损失的。因此对数据建模,进行参数估计时应该用原始数据(raw data)。
最后,简单介绍其他常见线性时不变滤波,这部分涉及随机过程,只做列举主要结论,具体参考信号分析II:随机过程 。
白化滤波(Whitening Filter):指定输入变为(零均值)白噪声∣ H ( f ) ∣ = 1 S x x ( f ) |H(f)| = \frac{1}{\sqrt{S_{xx}(f)}}
∣ H ( f ) ∣ = S x x ( f ) 1
这里S x x ( f ) S_{xx}(f) S x x ( f ) σ 2 \sigma^2 σ 2
成形滤波(Shaping Filter):(零均值)白噪声变为指定输出∣ H ( f ) ∣ = S x x ( f ) |H(f)| = \sqrt{S_{xx}(f)}
∣ H ( f ) ∣ = S x x ( f )
这里S x x ( f ) S_{xx}(f) S x x ( f )
最优滤波:从噪声数据中重建预期的目标信号(抑制噪声)x ( t ) = s ( t ) + n ( t ) , y ( t ) = x ( t ) ∗ h ( t ) \mathbf{x}(t) = s(t) + \mathbf{n}(t), ~~~ \mathbf{y}(t)=\mathbf{x}(t)*h(t)
x ( t ) = s ( t ) + n ( t ) , y ( t ) = x ( t ) ∗ h ( t )
这里x ( t ) \mathbf{x}(t) x ( t ) s ( t ) s(t) s ( t ) n ( t ) \mathbf{n}(t) n ( t )
最小化MSE:使输出y ( t ) \mathbf{y}(t) y ( t ) s ( t ) s(t) s ( t ) 维纳滤波 (Wiener Filter)、卡尔曼滤波 (Kalman Filter)H ( f ) = S s x ( f ) S x ( f ) \displaystyle H(f) = \frac{S_{sx}(f)}{S_{x}(f)}
H ( f ) = S x ( f ) S s x ( f )
H ( f ) H(f) H ( f ) S x ( f ) , S s x ( f ) S_{x}(f), S_{sx}(f) S x ( f ) , S s x ( f )
最大化SNR:使输出y ( t ) \mathbf{y}(t) y ( t ) 匹配滤波 (Matched Filter)H ( f ) = k X s ( f ) ‾ S n ( f ) H(f) = k \frac{\overline{X_s(f)}}{S_n(f)}
H ( f ) = k S n ( f ) X s ( f )
S n ( f ) S_n(f) S n ( f ) k k k H ( f ) = k X s ( f ) ‾ H(f) = k \overline{X_s(f)} H ( f ) = k X s ( f ) h ( t ) = k s ( − t ) h(t) = k s(-t) h ( t ) = k s ( − t ) h ( t ) h(t) h ( t ) s ( t ) s(t) s ( t ) x ( t ) x(t) x ( t ) s ( t ) s(t) s ( t ) S n ( f ) S_n(f) S n ( f ) Y ( f ) = k X s ( f ) ‾ S n ( f ) X ( f ) S n ( f ) = k X s ( f ) ‾ S n ( f ) X ( f ) Y(f) = \frac{ k \overline{X_s(f)}}{\sqrt{S_n(f)}} \frac{X(f)}{\sqrt{S_n(f)}} = \frac{ k \overline{X_s(f)}}{S_n(f)} X(f)
Y ( f ) = S n ( f ) k X s ( f ) S n ( f ) X ( f ) = S n ( f ) k X s ( f ) X ( f )
从频域理解,相比数据与模板直接相关,匹配滤波在计算相关时用噪声功率谱倒数进行加权,提升了低噪声频段的权重,进而可提升整体的信噪比。对于平稳的加性(高斯)噪声,匹配滤波是信噪比最大化的线性滤波器,但对于非线性滤波,通过结合信号过程的先验模型可能会取得更好的结果。
品质因子 Q-factor )的概念Q ≡ f r / Δ f Q \equiv f_r/\Delta f Q ≡ f r / Δ f f r f_r f r Δ f \Delta f Δ f f r f_r f r Δ f \Delta f Δ f Y ( f ) = H ( f ) X ( f ) Y(f)=H(f)X(f) Y ( f ) = H ( f ) X ( f )
对于滤波或信号的带宽,最简单的定义即为上下截止频率之差,即频谱非零区间,其它还有功率谱的分布方差(RMS带宽),以及功率响应的半高全宽等。其中对于半功率带宽,由于功率减半对应分贝数减小3dB,因此也被称为3dB带宽。需要注意的,对于现实的实信号系统,所有讨论都是针对非负频率,因此“带宽”仅为系统双边谱宽度的一半,尤其是对于基带系统,不要混淆。直观地,可将带宽视为携带有效信号的频率范围,尤其是在通信领域。对于实信号系统,负频率冗余,因此带宽仅考虑正频率,对于复信号系统,显然需要考虑双边谱。
实际中,由于高频更易获得大带宽,因此通常会用分数带宽描述系统带通,即带宽除以中心频率。分数带宽与品质因子互为倒数,对于滤波系统,大Q值对应窄带滤波,小Q值对应宽带滤波。
线性系统
根据线性代数,任何有限维度空间内的线性变换都可理解为矩阵乘法A x = A x \mathscr{A}x = A x A x = A x 核函数 ,矩阵乘法则变为针对核函数的积分,且根据Schwartz核函数定理,这种线性系统与核函数的对应是唯一的。
L { x ( t ) } = ∫ − ∞ ∞ k ( s , t ) x ( t ) d t \mathscr{L}\Bigl\{x(t)\Bigr\} = \int_{-\infty}^{\infty} k(s, t) x(t) dt
L { x ( t ) } = ∫ − ∞ ∞ k ( s , t ) x ( t ) d t
根据积分的线性性质,显然上述定义的操作属于线性运算。而作为类比:这里可将x ( t ) x(t) x ( t ) t t t k ( s , t ) k(s,t) k ( s , t ) s s s t t t s s s s s s k ( s , t ) = k ( t , s ) k(s, t) = k(t, s) k ( s , t ) = k ( t , s ) k ( s , t ) = k ( t , s ) ‾ k(s, t) = \overline{k(t, s)} k ( s , t ) = k ( t , s )
利用δ \delta δ
x ( t ) = ( δ ∗ x ) ( t ) = ∫ − ∞ ∞ δ ( t − τ ) x ( τ ) d τ x(t) = \bigr(\delta * x\bigr)(t) = \int_{-\infty}^{\infty} \delta(t-\tau) x(\tau) d\tau
x ( t ) = ( δ ∗ x ) ( t ) = ∫ − ∞ ∞ δ ( t − τ ) x ( τ ) d τ
而考虑到线性变换满足结合率:
L { x ( t ) } = L { ∫ − ∞ ∞ δ ( t − τ ) x ( τ ) d τ } = ∫ − ∞ ∞ L t { δ ( t − τ ) } x ( τ ) d τ \mathscr{L}\Bigl\{x(t)\Bigr\} = \mathscr{L}\left\{\int_{-\infty}^{\infty} \delta(t-\tau) x(\tau) d\tau \right\} = \int_{-\infty}^{\infty} \mathscr{L}_t\Bigl\{\delta(t-\tau)\Bigr\} x(\tau) d\tau
L { x ( t ) } = L { ∫ − ∞ ∞ δ ( t − τ ) x ( τ ) d τ } = ∫ − ∞ ∞ L t { δ ( t − τ ) } x ( τ ) d τ
δ ( t − τ ) \delta(t-\tau) δ ( t − τ ) L t \mathscr{L}_t L t t t t t t t k ( t , τ ) = L t { δ ( t − τ ) } k(t, \tau) = \mathscr{L}_t\Bigl\{\delta(t-\tau)\Bigr\} k ( t , τ ) = L t { δ ( t − τ ) } τ \tau τ δ ( t − τ ) \delta(t-\tau) δ ( t − τ ) 单位脉冲响应函数 ,也就确定了描述该线性系统的核函数。
显然,傅里叶变换属于线性变换,对比定义可得其核函数为k ( f , t ) = e − i 2 π f t k(f,t) = e^{-i2\pi f t} k ( f , t ) = e − i 2 π f t L t { δ ( t − τ ) } = F { δ ( t − τ ) } = e − i 2 π f τ \mathscr{L}_t\{\delta(t-\tau)\} = \mathcal{F}\{\delta(t-\tau)\}=e^{-i2\pi f \tau} L t { δ ( t − τ ) } = F { δ ( t − τ ) } = e − i 2 π f τ h ( τ − t ) h(\tau - t) h ( τ − t ) h ( τ + t ) h(\tau + t) h ( τ + t )
线性时不变LTI系统 (Linear Time-Invariant System)
T { x ( t − t 0 ) } = T { x ( t ) } ∣ t − t 0 \mathcal{T}\{x(t-t_0)\} = \mathcal{T}\{x(t)\}|_{t-t_0}
T { x ( t − t 0 ) } = T { x ( t ) } ∣ t − t 0
若前面讨论的线性系统为时不变系统,则系统脉冲响应L t { δ ( t − τ ) } = L { δ ( t ) } ∣ t − τ \mathscr{L}_t\{\delta(t-\tau)\} = \mathscr{L}\{\delta(t)\}|_{t-\tau} L t { δ ( t − τ ) } = L { δ ( t ) } ∣ t − τ t − τ t-\tau t − τ k ( t , τ ) = h ( t − τ ) k(t, \tau) = h(t-\tau) k ( t , τ ) = h ( t − τ ) t − τ t-\tau t − τ τ , t \tau, t τ , t τ \tau τ
L { x ( t ) } = ∫ − ∞ ∞ h ( t − τ ) x ( τ ) d τ = h ( t ) ∗ x ( t ) \mathscr{L}\Bigl\{x(t)\Bigr\} = \int_{-\infty}^{\infty} h(t-\tau) x(\tau) d\tau = h(t)*x(t)
L { x ( t ) } = ∫ − ∞ ∞ h ( t − τ ) x ( τ ) d τ = h ( t ) ∗ x ( t )
即,线性时不变LTI系统可由卷积表示 。反过来,也可证明,卷积形式的系统是线性时不变的。常见的LTI系统有时延、累加、差分、移动平均以及线性常系数微分/差分方程,二维图像卷积的平移不变形是“时”不变性在空间上的体现。h ( t ) h(t) h ( t ) 不 意味系统响应不含时,虽然,响应不含时的系统肯定是线性时不变的。
频率响应y ( t ) = h ( t ) ∗ x ( t ) y(t) = h(t) * x(t) y ( t ) = h ( t ) ∗ x ( t ) Y ( f ) = H ( f ) X ( f ) Y(f) = H(f)X(f)
Y ( f ) = H ( f ) X ( f )
其中H ( f ) H(f) H ( f )
本征函数L { v ( t ) } = λ v ( t ) \mathscr{L}\{v(t)\} = \lambda v(t) L { v ( t ) } = λ v ( t ) λ \lambda λ e i ω 0 t e^{i\omega_0t} e i ω 0 t h ( t ) ∗ e i ω 0 t ↔ F T H ( ω ) δ ( ω − ω 0 ) = H ( ω 0 ) δ ( ω − ω 0 ) ↔ F T H ( ω 0 ) e i ω 0 t h(t) * e^{i\omega_0 t} \xleftrightarrow{FT} H(\omega) \delta(\omega-\omega_0)=H(\omega_0) \delta(\omega-\omega_0) \xleftrightarrow{FT} H(\omega_0) e^{i\omega_0 t}
h ( t ) ∗ e i ω 0 t F T H ( ω ) δ ( ω − ω 0 ) = H ( ω 0 ) δ ( ω − ω 0 ) F T H ( ω 0 ) e i ω 0 t
L { e i ω 0 t } = H ( ω 0 ) e i ω 0 t \mathscr{L}\{e^{i\omega_0 t}\} = H(\omega_0) e^{i\omega_0 t}
L { e i ω 0 t } = H ( ω 0 ) e i ω 0 t
因此e i ω 0 t e^{i\omega_0t} e i ω 0 t H ( ω 0 ) H(\omega_0) H ( ω 0 ) ∑ k α k e i ω k t \sum_k \alpha_k e^{i\omega_k t} ∑ k α k e i ω k t ∑ k α k H ( ω k ) e i ω k t \sum_k \alpha_k H(\omega_k)e^{i\omega_k t} ∑ k α k H ( ω k ) e i ω k t s s s e s t e^{st} e s t
确定LTI系统脉冲响应h ( t ) h(t) h ( t )
直接根据定义:输入脉冲信号,测量系统响应
利用频域特征:输入扫频信号,测量频响曲线H ( f ) = Y ( f ) X ( f ) H(f)=\frac{Y(f)}{X(f)} H ( f ) = X ( f ) Y ( f )
用信号互相关:输出与输入计算互相关有r y x ( t ) = r x x ( t ) ∗ h ( t ) r_{yx}(t) = r_{xx}(t) * h(t) r y x ( t ) = r x x ( t ) ∗ h ( t ) r x x ( t ) = δ ( t ) r_{xx}(t)=\delta(t) r x x ( t ) = δ ( t ) r y x ( t ) = h ( t ) r_{yx}(t) = h(t) r y x ( t ) = h ( t )
因果系统 h ( t ) = 0 , ∀ t < 0 h(t)=0, \forall t<0 h ( t ) = 0 , ∀ t < 0
FIR v.s. IIR
前面对于线性滤波的讨论都是从频域出发,比如基于频域 响应H ( f ) H(f) H ( f ) 时域 的脉冲响应函数h ( t ) h(t) h ( t )
有限脉冲响应FIR(Finite impulse response ):脉冲响应持续时间有限y [ n ] = ∑ i = 0 N b i x [ n − i ] y[n] = \sum_{i=0}^N b_i x[n-i]
y [ n ] = i = 0 ∑ N b i x [ n − i ]
无限脉冲响应IIR(Infinite impulse response ):脉冲响应持续时间无限y [ n ] = 1 a 0 ( ∑ i = 0 P b i x [ n − i ] + ∑ j = 1 Q a j y [ n − j ] ) y[n] = \frac{1}{a_0}\left(\sum_{i=0}^P b_i x[n-i] + \sum_{j=1}^Q a_j y[n-j]\right)
y [ n ] = a 0 1 ( i = 0 ∑ P b i x [ n − i ] + j = 1 ∑ Q a j y [ n − j ] )
有限脉冲响应FIR,即脉冲响应会在有限时间内变为0。上面的卷积表达式为离散的因果FIR滤波,但原则上FIR滤波可以是连续的、也可是非因果的(i < 0 i<0 i < 0 N N N b i b_i b i i i i h [ n ] = b n , n ∈ [ 0 , N ] h[n] = b_n, n \in [0,N] h [ n ] = b n , n ∈ [ 0 , N ] Y ( z ) = ∑ i = 0 N b i z − i X ( z ) Y(z) = \sum_{i=0}^N b_i z^{-i} X(z) Y ( z ) = ∑ i = 0 N b i z − i X ( z )
H ( z ) ≡ Y ( z ) X ( z ) = ∑ i = 0 N b i z − i H(z) \equiv \frac{Y(z)}{X(z)} = \sum_{i=0}^N b_i ~ z^{-i}
H ( z ) ≡ X ( z ) Y ( z ) = i = 0 ∑ N b i z − i
无限脉冲响应存在反馈回路 ,理论上可无限持续,如最简单的y [ n ] = y [ n − 1 ] y[n] = y[n-1] y [ n ] = y [ n − 1 ] 1 / a 0 1/a_0 1 / a 0 ∑ i = 0 P b i x [ n − i ] = ∑ j = 0 Q a j y [ n − j ] \sum_{i=0}^P b_i x[n-i] = \sum_{j=0}^Q a_j y[n-j] ∑ i = 0 P b i x [ n − i ] = ∑ j = 0 Q a j y [ n − j ] P P P b i b_i b i Q Q Q a j a_j a j ∑ i = 0 P b i z − i X ( z ) = ∑ j = 0 Q a j z − j Y ( z ) \sum_{i=0}^P b_i z^{-i} X(z) = \sum_{j=0}^Q a_j z^{-j} Y(z) ∑ i = 0 P b i z − i X ( z ) = ∑ j = 0 Q a j z − j Y ( z )
H ( z ) ≡ Y ( z ) X ( z ) = ∑ i = 0 P b i z − i ∑ j = 0 Q a j z − j = ∑ i = 0 P b i z − i 1 + ∑ j = 1 Q a j z − j H(z)\equiv \frac{Y(z)}{X(z)} = \frac{\sum_{i=0}^P b_i ~ z^{-i}}{\sum_{j=0}^Q a_j ~ z^{-j}} = \frac{\sum_{i=0}^P b_i ~ z^{-i}}{1 + \sum_{j=1}^Q a_j ~ z^{-j}}
H ( z ) ≡ X ( z ) Y ( z ) = ∑ j = 0 Q a j z − j ∑ i = 0 P b i z − i = 1 + ∑ j = 1 Q a j z − j ∑ i = 0 P b i z − i
最后一项是因为a 0 a_0 a 0
FIR的优势在于不存在反馈,相对简单稳定,且舍入误差不会累积。此外系数对称情况下,其引入的相位延迟为线性的 ,所有频率延迟为单一确定值,这对于需考虑相位的通信及信号分析等情况很重要。其缺点在于要达到相同的滤波效果,尤其频谱过渡锐利的情况,FIR相比IIR通常需要更高的阶数,意味着更大的计算量及内存需求。设计时通常要针对目标效果进行最优化分析,设计难度相对高。
相对的,IIR的优势在于通常可以用更低的阶数实现滤波要求,意味着更低的计算量以及时间延迟(阶数低)。其设计相对简单,可近似模拟电路效果,如用于音频信号的均衡器等。其缺点在于由于反馈回路的存在,相对不稳定,使用时需要格外注意数值稳定性,且具有非线性的相位延迟,不同频率延迟不同。更多具体对比可参考该链接 。
积分变换
上面介绍了函数空间中线性变换被定义为针对核函数的积分,这些变换更常见的名字是积分变换,其他常见的还有拉普拉斯(Laplace)变换及希尔伯特(Hilbert)变换等。拉普拉斯(Laplace)变换 i i i
F { x ( t ) } = ∫ − ∞ ∞ x ( t ) e − i ω t d t → i ω → s = σ + i ω ∫ − ∞ ∞ x ( t ) e − s t d t = L { x ( t ) } \mathcal{F}\{x(t)\} = \int_{-\infty}^{\infty} x(t) e^{-i\omega t} dt \xrightarrow{\boxed{i\omega \rightarrow s=\sigma+i\omega} } \int_{-\infty}^{\infty} x(t) e^{-st} dt = \mathcal{L}\{x(t)\}
F { x ( t ) } = ∫ − ∞ ∞ x ( t ) e − i ω t d t i ω → s = σ + i ω ∫ − ∞ ∞ x ( t ) e − s t d t = L { x ( t ) }
X ( s ) = ∫ − ∞ ∞ x ( t ) e − s t d t , x ( t ) = 1 2 π i ∫ σ − i ∞ σ + i ∞ X ( s ) e s t d s \boxed{X(s) = \int_{-\infty}^{\infty} x(t) e^{-st} dt, ~~~ x(t) = \frac{1}{2\pi i} \int_{\sigma-i\infty}^{\sigma+i\infty} X(s) e^{st} ds}
X ( s ) = ∫ − ∞ ∞ x ( t ) e − s t d t , x ( t ) = 2 π i 1 ∫ σ − i ∞ σ + i ∞ X ( s ) e s t d s
其中复频域s = σ + i ω s=\sigma+i\omega s = σ + i ω s s s s s s σ = 0 \sigma=0 σ = 0 d s = i d ω ds=id\omega d s = i d ω X ( i ω ) X(i\omega) X ( i ω ) j j j i i i s = i ω s=i\omega s = i ω
为什么要引入Laplace变换?e − σ t e^{-\sigma t} e − σ t f ( t ) f(t) f ( t ) ∣ f ( t ) ∣ ≤ M e c ∣ t ∣ |f(t)| {\footnotesize\le} Me^{c|t|} ∣ f ( t ) ∣ ≤ M e c ∣ t ∣ t > 0 t{\scriptsize >}0 t > 0 σ \sigma σ t < 0 t{\scriptsize <}0 t < 0 σ \sigma σ
X ( s ) = ∫ 0 ∞ x ( t ) e − s t d t = ∫ − ∞ ∞ x ( t ) u ( t ) e − s t d t X(s) = \int_0^{\infty} x(t) e^{-st} dt = \int_{-\infty}^{\infty} x(t)u(t) e^{-st} dt
X ( s ) = ∫ 0 ∞ x ( t ) e − s t d t = ∫ − ∞ ∞ x ( t ) u ( t ) e − s t d t
其中u ( t ) u(t) u ( t ) u ( t ) u(t) u ( t ) σ \sigma σ σ \sigma σ
Z变换s s s z = e s T z=e^{sT} z = e s T
∫ − ∞ ∞ x ( t ) e − s t d t → t = n T ∑ − ∞ ∞ T x ( n T ) e − s n T → z = e s T T ∑ − ∞ ∞ x n z − n \int_{-\infty}^{\infty} x(t) e^{-st} dt \xrightarrow{t=nT} \sum_{-\infty}^{\infty} T x(nT) e^{-s~nT} \xrightarrow{z=e^{sT}} T\sum_{-\infty}^{\infty} x_n z^{-n}
∫ − ∞ ∞ x ( t ) e − s t d t t = n T − ∞ ∑ ∞ T x ( n T ) e − s n T z = e s T T − ∞ ∑ ∞ x n z − n
其中∑ x n z − n \sum x_n z^{-n} ∑ x n z − n x n = x ( n T ) x_n=x(nT) x n = x ( n T ) s s s z z z z z z z = e s T = e σ T e i ω T z=e^{sT} = e^{\sigma T} e^{i\omega T} z = e s T = e σ T e i ω T s s s σ \sigma σ z z z e σ T e^{\sigma T} e σ T s s s z z z
具体的,参照DTFT,利用泊松求和公式有,离散序列的Laplace变换X ( s ) X(s) X ( s ) ω \omega ω 1 T \frac{1}{T} T 1 ω \omega ω z z z
X ( z ) = ∑ − ∞ ∞ x n z − n , x n = 1 2 π i ↺ ∫ X ( z ) z n − 1 d z \boxed{X(z) = \sum_{-\infty}^{\infty} x_n z^{-n}, ~~~ x_n = \frac{1}{2\pi i} \mathop{\rlap{$\mkern5.5mu\circlearrowleft$}\int} X(z) z^{n-1} dz}
X ( z ) = − ∞ ∑ ∞ x n z − n , x n = 2 π i 1 ↺ ∫ X ( z ) z n − 1 d z
其中逆变换中的积分为绕原点逆时针方向的环路积分。当s s s σ = 0 \sigma=0 σ = 0 z z z z z z
Mellin变换(梅林变换)t t t e − t e^{-t} e − t
∫ − ∞ ∞ x ( t ) e − s t d t → τ = e − t ∫ ∞ 0 x ( e − τ ) τ s d τ − τ = ∫ 0 ∞ x ~ ( τ ) τ s − 1 d τ \int_{-\infty}^{\infty} x(t) e^{-st} dt \xrightarrow{\tau=e^{-t}} \int_{\infty}^{0} x(e^{-\tau}) \tau^s \frac{d\tau}{-\tau} = \int_{0}^{\infty} \tilde{x}(\tau) \tau^{s-1} d\tau
∫ − ∞ ∞ x ( t ) e − s t d t τ = e − t ∫ ∞ 0 x ( e − τ ) τ s − τ d τ = ∫ 0 ∞ x ~ ( τ ) τ s − 1 d τ
X ( s ) = ∫ 0 ∞ x ( t ) t s − 1 d t , x ( t ) = 1 2 π i ∫ σ − i ∞ σ + ∞ X ( s ) t − s d s \boxed{X(s) = \int_{0}^{\infty} x(t) t^{s-1} d t, ~~~ x(t) = \frac{1}{2\pi i}\int_{\sigma-i\infty}^{\sigma+\infty} X(s) t^{-s} d s}
X ( s ) = ∫ 0 ∞ x ( t ) t s − 1 d t , x ( t ) = 2 π i 1 ∫ σ − i ∞ σ + ∞ X ( s ) t − s d s
Mellin变换本质还是Laplace变换,且目标域保持不变,其优势在于t t t e − t e^{-t} e − t s s s M { x ( a t ) } = a − s M { x ( t ) } \mathcal{M}\{x(at)\} = a^{-s}\mathcal{M}\{x(t)\} M { x ( a t ) } = a − s M { x ( t ) } s s s ∣ M { x ( a t ) } ∣ = ∣ M { x ( t ) } ∣ |\mathcal{M}\{x(at)\}| = |\mathcal{M}\{x(t)\}| ∣ M { x ( a t ) } ∣ = ∣ M { x ( t ) } ∣ e − t e^{-t} e − t Γ ( s ) = ∫ 0 ∞ t s − 1 e − t d t \Gamma(s) = \int_{0}^{\infty} t^{s-1} e^{-t} d t Γ ( s ) = ∫ 0 ∞ t s − 1 e − t d t
最后,可以看到Laplace、Fourier、Mellin以及Z变换本质上都是同一个事物,只是具体场景不同。由于各自主要的应用领域和解决的具体问题有所区别,历史中的发展也基本相对独立,最终造就了各自迥异的名字,未能反映内在的统一性。
希尔伯特(Hilbert)变换
对实信号有X ( − ω ) = X ( ω ) ‾ X(-\omega) = \overline{X(\omega)} X ( − ω ) = X ( ω ) X + ( ω ) = 2 X ( ω ) u ( ω ) X_{+}(\omega)=2X(\omega)u(\omega) X + ( ω ) = 2 X ( ω ) u ( ω ) u ( ω ) u(\omega) u ( ω )
u ( ω ) = 1 2 [ 1 + sign ( ω ) ] = { 1 if ω > 0 0.5 if ω = 0 0 if ω < 0 u(\omega) = \frac{1}{2}\Big[1+\text{sign}(\omega)\Big] = \begin{cases}
1 &\text{if } \omega>0 \\
0.5 &\text{if } \omega=0 \\
0 &\text{if } \omega<0
\end{cases} u ( ω ) = 2 1 [ 1 + sign ( ω ) ] = ⎩ ⎪ ⎪ ⎨ ⎪ ⎪ ⎧ 1 0 . 5 0 if ω > 0 if ω = 0 if ω < 0
这种情况下,X + ( ω ) X_{+}(\omega) X + ( ω ) 4 ∣ X ( ω ) ∣ 2 N f s 4\frac{|X(\omega)|^2}{Nf_s} 4 N f s ∣ X ( ω ) ∣ 2 X ( ω ) X(\omega) X ( ω ) 2 ∣ X ( ω ) ∣ 2 N f s 2\frac{|X(\omega)|^2}{Nf_s} 2 N f s ∣ X ( ω ) ∣ 2
对X + ( ω ) X_{+}(\omega) X + ( ω ) 1 1 1 δ ( t ) \delta(t) δ ( t ) s i g n ( ω ) {\rm sign}(\omega) s i g n ( ω ) i π t \frac{i}{\pi t} π t i
x + ( t ) = x ( t ) ∗ [ δ ( t ) + i π t ] = x ( t ) + i x ( t ) ∗ 1 π t x_{+}(t) = x(t) * \left[\delta(t) + \frac{i}{\pi t}\right] = x(t) + i ~ x(t)*\frac{1}{\pi t}
x + ( t ) = x ( t ) ∗ [ δ ( t ) + π t i ] = x ( t ) + i x ( t ) ∗ π t 1
即消除负频率后对应的时域信号为复信号,实部为原信号x ( t ) x(t) x ( t ) x ( t ) ∗ 1 π t x(t)*\frac{1}{\pi t} x ( t ) ∗ π t 1 解析信号 (analytic signal),其虚部则被定义为实部的Hilbert变换。注意解析信号不是普通的复信号,其核心是没有负频率。解析信号的实部和虚部通过Hilbert变换关联,两者相互正交、幅值相同、相位错± π 2 \pm\frac{\pi}{2} ± 2 π
下面具体分析Hilbert变换本身的性质:
H { x ( t ) } = x ( t ) ∗ 1 π t = 1 π ∫ − ∞ ∞ x ( τ ) t − τ d τ , H − 1 = − H \boxed{\mathcal{H}\{x(t)\} = x(t) * \frac{1}{\pi t} = \frac{1}{\pi}\int_{-\infty}^{\infty}\frac{x(\tau)}{t-\tau} d\tau, ~~~ \mathcal{H}^{-1} = -\mathcal{H}}
H { x ( t ) } = x ( t ) ∗ π t 1 = π 1 ∫ − ∞ ∞ t − τ x ( τ ) d τ , H − 1 = − H
从频域理解,1 π t \frac{1}{\pi t} π t 1
1 π t ↔ F T σ H ( ω ) = − i sign ( ω ) { − i = e − i π 2 if ω > 0 0 if ω = 0 i = e i π 2 if ω < 0 \frac{1}{\pi t} \xleftrightarrow{FT} \sigma_H(\omega)=-i~\text{sign}(\omega)\begin{cases}
-i=e^{-i\frac{\pi}{2}} &\text{if } \omega>0 \\
0 &\text{if } \omega=0 \\
i=e^{i\frac{\pi}{2}} &\text{if } \omega<0
\end{cases} π t 1 F T σ H ( ω ) = − i sign ( ω ) ⎩ ⎪ ⎪ ⎨ ⎪ ⎪ ⎧ − i = e − i 2 π 0 i = e i 2 π if ω > 0 if ω = 0 if ω < 0
根据卷积定理:
H { x ( t ) } = F − 1 { X ( ω ) σ H ( ω ) } \mathcal{H}\{x(t)\} = \mathcal{F}^{-1} \{X(\omega) \sigma_H(\omega)\}
H { x ( t ) } = F − 1 { X ( ω ) σ H ( ω ) }
因此Hilbert变换会使原信号的相位移动± π 2 \pm\frac{\pi}{2} ± 2 π − π 2 -\frac{\pi}{2} − 2 π + π 2 +\frac{\pi}{2} + 2 π
最后,介绍下解析信号的性质及应用:x + ( t ) = ∣ x + ( t ) ∣ e j ϕ ( t ) = a ( t ) e j ϕ ( t ) x_{+}(t) = |x_{+}(t)|e^{j\phi(t)} = a(t)e^{j\phi(t)} x + ( t ) = ∣ x + ( t ) ∣ e j ϕ ( t ) = a ( t ) e j ϕ ( t ) a ( t ) a(t) a ( t ) 包络线 ;ϕ ( t ) \phi(t) ϕ ( t ) 相位角 。瞬时相位的导数被称为瞬时角频率ω ( t ) = ϕ ˙ ( t ) , ϕ ( t ) = θ + ∫ 0 t ω ( t ) d t \omega(t) = \dot{\phi}(t), \phi(t) = \theta + \int_0^t \omega(t) dt ω ( t ) = ϕ ˙ ( t ) , ϕ ( t ) = θ + ∫ 0 t ω ( t ) d t f ( t ) = 1 2 π ω ( t ) f(t) =\frac{1}{2\pi}\omega(t) f ( t ) = 2 π 1 ω ( t )
注意,幅角相差整数倍的2 π 2\pi 2 π ( − π , π ] (-\pi, \pi] ( − π , π ] [ 0 , 2 π ) [0, 2\pi) [ 0 , 2 π ) unwrap可进行相位展开,默认周期为2 π 2\pi 2 π π \pi π
傅里叶变换反映的是一段时间内的平均值,而解析信号的振幅与频率则是瞬时值。
傅里叶变换是一个全局估计,它告诉了我们观测信号整个时间段里的一个综合表现。
上面介绍的都是连续的核函数k ( τ , t ) k(\tau, t) k ( τ , t ) k n ( t ) k_n(t) k n ( t )
在普通的傅里叶变换中,信号的时域特征与频率特征不可兼得,对于稳态信号频域特征或许是足够的,但对于快速变化的非稳态信号,通常需要同时考虑频域和时域信息,分析频率成分的同时定位具体出现的时间,时频谱(Spectrogram )是更好的选择。最简单的做法是将信号在时间上均匀划分为小片段,分别进行傅里叶变换,即短时傅里叶变换STFT。计算信号在每个时间片段的功率谱密度即可得到作为时间和频率函数的二维时频谱。其它如小波变换,可以根据频率调整分辨率,对于高频部分增加时间分辨率,对于低频部分则提升频率分辨率,对于快速变化的瞬时信号有较好效果。
https://en.wikipedia.org/wiki/Time–frequency_analysis
将信号在时间上均匀划分为小片段,分别进行傅里叶变换,其中时间片段的划分会使用窗口函数w ( t ) w(t) w ( t )
X ( ω , t ) = ∫ x ( τ ) w ∗ ( τ − t ) e − i ω τ d τ X(\omega, t) = \int x(\tau) w^*(\tau - t)e^{-i\omega \tau} d\tau
X ( ω , t ) = ∫ x ( τ ) w ∗ ( τ − t ) e − i ω τ d τ
X ( k , m ) = ∑ n x n w ∗ ( n − m I ) e − i 2 π k N n X(k, m) = \sum_n x_n w^*(n - mI)e^{-i\frac{2\pi k}{N} n}
X ( k , m ) = n ∑ x n w ∗ ( n − m I ) e − i N 2 π k n
P ( k , m ) = ∣ X ( k , m ) ∑ w n ∣ 2 , S ( k , m ) = ∣ X ( k , m ) ∣ 2 f s ∑ ∣ w n ∣ 2 P(k, m) = \left|\frac{X(k, m)}{\sum w_n}\right|^2, ~ S(k, m) = \frac{|X(k, m)|^2}{f_s\sum |w_n|^2}
P ( k , m ) = ∣ ∣ ∣ ∣ ∣ ∑ w n X ( k , m ) ∣ ∣ ∣ ∣ ∣ 2 , S ( k , m ) = f s ∑ ∣ w n ∣ 2 ∣ X ( k , m ) ∣ 2
上式中I I I N N N O O O m m m m I mI m I ⌊ L − N I ⌋ + 1 = ⌊ L − O N − O ⌋ \left⌊\frac{L-N}{I}\right⌋+1 = \left⌊\frac{L-O}{N-O}\right⌋ ⌊ I L − N ⌋ + 1 = ⌊ N − O L − O ⌋
numpy未提供时频谱函数,scipy.signal中计算时频谱的函数有stft和spectrogram两个:前者直接对应(修正后的)STFT谱,默认为离散复值谱1 ∑ w n X ( k , m ) \frac{1}{\sum w_n}X(k, m) ∑ w n 1 X ( k , m ) specgram,大致与spectrogram对应,但默认参数上有所不同。
注意,signal.stft有两个独有参数boundary和padded,默认值分别为’zeros’和True,会改变时间窗数量。窗口函数压低窗口边缘值,重叠可对序列内部实现补偿,但无法处理边界,通过延拓可将序列起点移至窗口中心。boundary用于控制延拓行为,‘even’/'odd’延拓值关于端点偶/奇对称,'zeros’对应取0,'constant’取端点值,'None’对应不延拓。padded用于控制是否补零,以使序列刚好对应整数窗口,即(L - nperseg)/(nperseg - noverlap)为整数。注意延拓是首尾对称进行的,而补零则只在序列末尾。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 import numpy as npfrom scipy import signalfrom matplotlib import pyplot as pltfs = 1e4 t = np.arange(0 , 1 , 1 /fs) f = 500 + 300 *np.sin(2 *np.pi*3 *t) s = np.sin(2 *np.pi*f*t) win = signal.windows.hann(256 ) def spectrogram_plot (freqs, times, psd, ax, **kwargs ): pad_t = (times[1 ]-times[0 ]) / 2 t_min = times[0 ] - pad_t t_max = times[-1 ] + pad_t pad_f = (freqs[1 ]-freqs[0 ]) / 2 f_min = freqs[0 ] - pad_f f_max = freqs[-1 ] + pad_f extent = t_min, t_max, f_min, f_max Z = 10 *np.log10(psd) ax.imshow(Z, extent=extent, aspect='auto' , origin='lower' , **kwargs) fig, axes = plt.subplots(2 , 1 ) psd, freqs, times, _ = axes[0 ].specgram(s, Fs=fs, sides='twosided' ) spectrogram_plot(freqs, times, psd, axes[1 ]) plt.show() def spectrogram_shift (freqs, psd ): freqs = np.fft.fftshift(freqs) psd = np.fft.fftshift(psd, axes=0 ) return freqs, psd freqs1, times1, psd1 = signal.spectrogram(s, fs=fs, nperseg=256 , noverlap=128 , detrend=False , window=win, return_onesided=False ) freqs1, psd1 = spectrogram_shift(freqs1, psd1) print (np.abs (psd - psd1).max ())freqs2, times2, spec2 = signal.stft(s, fs=fs, window=win, return_onesided=False , boundary=None , padded=False , scaling='psd' ) freqs2, psd2 = spectrogram_shift(freqs2, np.abs (spec2)**2 ) print (np.abs (psd - psd2).max ())
注意,相位与频率关系为ϕ ( t ) = ∫ ω ( t ) d t , ω ( t ) = ϕ ˙ ( t ) \phi(t) = \int \omega(t)dt, \omega(t) = \dot{\phi}(t) ϕ ( t ) = ∫ ω ( t ) d t , ω ( t ) = ϕ ˙ ( t ) sin ( ω ( t ) t ) \sin\left( \omega(t) t\right) sin ( ω ( t ) t ) ω ( t ) + ω ˙ ( t ) t \omega(t) + \dot{\omega}(t)t ω ( t ) + ω ˙ ( t ) t ω ( t ) \omega(t) ω ( t ) sin ( sin ( t ) t ) \sin\left(\sin(t)t\right) sin ( sin ( t ) t ) sin ( t ) + cos ( t ) t \sin(t)+\cos(t)t sin ( t ) + cos ( t ) t
由于时频分析中不确定性原理的限制,时域分辨率和频域分辨率不可兼得,两者不确定性存在下限Δ t Δ ω > 1 / 2 \Delta t\Delta \omega > 1/2 Δ t Δ ω > 1 / 2
傅里叶变换本质是信号在函数空间的展开,而空间的基函数是不同频率的正余弦函数e − i ω t = e − i π f t e^{-i\omega t}=e^{-i\pi f t} e − i ω t = e − i π f t wavelet ),之所以叫“小波”是因为相较于无限延伸的正余弦函数,后者只存在于有限的时间区间。正余弦函数由于在时间上不是定域的,可以分析信号的频率成分却无法确定对应的时间区间,以“小波”作为基函数则不存在该问题。作为基函数的小波是由母小波ψ ( t ) \psi(t) ψ ( t ) ψ a , b = 1 a ψ ( t − b a ) \psi_{a,b} = \frac{1}{\sqrt{a}}\psi(\frac{t-b}{a}) ψ a , b = a 1 ψ ( a t − b ) a , b a, b a , b
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 import pywtimport matplotlib.pyplot as pltcontinuous_wavelets = ['morl' , 'mexh' ] discrete_wavelets = ['db2' , 'Haar' ] list_list_wavelets = [continuous_wavelets, discrete_wavelets] list_funcs = [pywt.ContinuousWavelet, pywt.Wavelet] fig, axarr = plt.subplots(nrows=2 , ncols=2 , figsize=(8 ,8 )) for row, list_wavelets in enumerate (list_list_wavelets): func = list_funcs[row] for col, waveletname in enumerate (list_wavelets): wavelet = func(waveletname) if row == 1 : scaling_function, wavelet_function, x_values = wavelet.wavefun() else : wavelet_function, x_values = wavelet.wavefun() if col == 0 and row == 0 : axarr[row, col].set_ylabel("Continuous Wavelets" , fontsize=16 ) if col == 0 and row == 1 : axarr[row, col].set_ylabel("Discrete Wavelets" , fontsize=16 ) axarr[row, col].set_title(f"{wavelet.family_name} " , fontsize=16 ) axarr[row, col].plot(x_values, wavelet_function, linewidth=2 , color='k' ) axarr[row, col].set_yticks([]) axarr[row, col].set_yticklabels([]) plt.tight_layout() plt.savefig('demo.png' , transparent=True ) plt.show()
W ( a , b ) = ∫ x ( t ) ψ a , b ∗ ( t ) d t , a > 0 ↔ x ( t ) = 1 C ψ a 2 ∬ a > 0 W ( a , b ) ψ a , b ∗ ( t ) d a d b W(a, b) =\int x(t) \psi^*_{a,b}(t) dt, a>0 ~~~ \leftrightarrow ~~~~ x(t) = \frac{1}{C_\psi a^2} \iint_{a>0} W(a, b) \psi^*_{a,b}(t)~da db
W ( a , b ) = ∫ x ( t ) ψ a , b ∗ ( t ) d t , a > 0 ↔ x ( t ) = C ψ a 2 1 ∬ a > 0 W ( a , b ) ψ a , b ∗ ( t ) d a d b
容许条件(admissibility condition):小波变换逆变换中的系数C ψ = ∫ ∣ Ψ ( ω ) ∣ 2 ∣ ω ∣ d ω C_\psi = \int \frac{|\Psi(\omega)|^2}{|\omega|} d\omega C ψ = ∫ ∣ ω ∣ ∣ Ψ ( ω ) ∣ 2 d ω Ψ ( ω ) = ∫ ψ ( t ) e − 2 i ω t d t \Psi(\omega)=\int \psi(t)e^{-2i\omega t} dt Ψ ( ω ) = ∫ ψ ( t ) e − 2 i ω t d t ∣ Ψ ( ω ) ∣ |\Psi(\omega)| ∣ Ψ ( ω ) ∣ ∣ ω ∣ − 1 / 2 |\omega|^{-1/2} ∣ ω ∣ − 1 / 2 ∣ Ψ ( ω ) ∣ ω = 0 = 0 |\Psi(\omega)|_{\omega=0} =0 ∣ Ψ ( ω ) ∣ ω = 0 = 0 Ψ ( 0 ) = ∫ ψ ( t ) d t = 0 \Psi(0) = \int \psi(t) dt = 0 Ψ ( 0 ) = ∫ ψ ( t ) d t = 0 ψ ( t ) \psi(t) ψ ( t )
正则条件(regularity conditions):要求小波在时域和频域均平滑且集中(衰减快),通常用消失距进行表示。小波函数的n n n M n { ψ } = ∫ t n ψ ( t ) d t M_n\{\psi\} = \int t^n \psi(t) dt M n { ψ } = ∫ t n ψ ( t ) d t W ( a , 0 ) = ∫ ∑ n x ( n ) ( 0 ) n ! t n 1 a ψ ( t a ) d t = 1 a ∑ n x ( n ) ( 0 ) n ! a n + 1 ∫ t n ψ ( t ) d t W(a, 0) = \int \sum_n \frac{x^{(n)}(0)}{n!} t^n \frac{1}{\sqrt{a}} \psi(\frac{t}{a}) dt = \frac{1}{\sqrt{a}} \sum_n \frac{x^{(n)}(0)}{n!} ~ a^{n+1} \int t^n \psi(t) dt W ( a , 0 ) = ∫ ∑ n n ! x ( n ) ( 0 ) t n a 1 ψ ( a t ) d t = a 1 ∑ n n ! x ( n ) ( 0 ) a n + 1 ∫ t n ψ ( t ) d t n n n n + 2 n+2 n + 2
与普通STFT得到的时频谱相比,小波变换中小波函数本身就兼具窗口函数的功能,且窗口宽度可变:随着缩放因子a a a
注意,由于小波并非周期函数,不存在确定的频率,相较于傅里叶变换获取信号的不同频率成分,小波变换是在不同尺度上审视信号。因此小波变换得到的时频谱通常会使用尺度因子(scale)代替频率作为纵轴,也被称为Scaleogram。不过使用母函数的中心频率除以尺度因子可以得到“伪频率”(pseudo-frequency),变换回频域绘制通常的时频谱。
小波变换继承和发展了STFT的局部化思想,事实上Morlet小波变换与Gabor变换(高斯窗口的STFT)在数学上等价:Morlet小波本质上就是平面波(正余弦函数)与高斯窗口的叠加,因此也被称为Gabor小波。不同之处在于,Gabor变换为STFT,时间窗口固定,Morlet小波变换则是其多分辨(multiresolution)变种,通过尺度因子实现了时间窗口随频率的自适应变化,很好的平衡了时域与频域信息。
连续小波变换CWT将信号转换到时频域时存在较多信息冗余,为减少计算量更常用的是离散小波变换DWT,后者小波函数中的尺度与平移因子取为离散值,最常见的选择是二分采样 (dyadic sampling):尺度因子每次增加为之前2倍(频率↓),平移间隔也对应增加为之前2倍(采样率↓),a = 2 j , b = k 2 j , ψ j , k = 1 2 j ψ ( t − k 2 j 2 j ) a = 2^j, b= k 2^j, \psi_{j,k} = \frac{1}{\sqrt{2^j}}\psi(\frac{t-k2^j}{2^j}) a = 2 j , b = k 2 j , ψ j , k = 2 j 1 ψ ( 2 j t − k 2 j )
离散小波变换中,每个小波函数只能覆盖特定频率区间,且随频率降低,对应区间也逐渐缩小,为避免无限迭代,又引入了尺度函数 (scaling function),用于覆盖特定截止频率以下的所有频率区间。使用尺度函数代替小波函数,忽略了部分尺度信息,理论上存在信息丢失,但实际上并不会影响信号的重建(?)。
最后,离散小波变换通常会实现为迭代滤波器组(filter bank):信号频谱被分为高频和低频两部分,对应信号中细节与整体信息,高频部分由小波函数对应的高通/带通滤波器(HP)提取,低频部分则由尺度函数对应的低通滤波器(LP)提取;之后对于低频部分,经下采样后,再次二分处理,提取细节信息,依次迭代分解,如下图所示。直至信号的分解结果符合要求,或达到最大分解层级(样本数少于滤波器宽度)。在这一过程中,信号被分解到多个子频带进行处理,通常被称为子带编码(subband coding)。在迭代过程中,带通滤波器的中心频率及宽度逐层减半,同时信号也随之进行下采样,与二分采样的离散小波变换相对应。
STFT是对时间分片,不同时间片段信号的变换并不相关;DWT则是对频率分带,需要处理全部时间的信号,每次提取特定频率(尺度)的成分,从最小的尺度开始,由高频到低频逐步降低频率(同时对数据下采样)。从滤波器角度看,STFT是整体均匀的频带划分,DWT则是对低频部分迭代二分,形成树状的滤波器组。
离散小波变换中,随频率降低尺度因子增加,一般取为对数均匀,最常见的是尺度因子依次翻倍(指数增长)、频率带宽减半(分辨率提升),同时相应的减半时间采样率。
在离散小波变换中,频率通常取为对数均匀,如前面的二分采样。在这样的实现下,每个频带的中心频率与频带宽度之比(Q值)为常数,也被称为常数Q变换。Q变换最初由Brown J.提出,用于处理音乐信号,因为音阶所对应的频率为对数均匀,Brown据此提出了
X ( t , ω ) = ∫ x ( τ ) w ∗ ( τ − t , ω ) e − i ω τ d τ X(t, \omega) = \int x(\tau) w^*(\tau - t, \omega)e^{-i\omega \tau} d\tau
X ( t , ω ) = ∫ x ( τ ) w ∗ ( τ − t , ω ) e − i ω τ d τ
与普通STFT相比,这里窗口函数是频率的函数:其宽度与频率成反比。实现上则通常基于傅里叶变换:将信号的傅里叶变换频移后与频域窗口函数相乘,之后再逆傅里叶变换。尤其是在离散变换中,可借助快速傅里叶变换的计算优势。
X ( t , ω ) = ∫ x ~ ( ϕ + ω ) w ~ ∗ ( ϕ , ω ) e i ϕ f d ϕ X(t, \omega) = \int \tilde{x}(\phi + \omega) \tilde{w}^*(\phi, \omega)e^{i\phi f} d\phi
X ( t , ω ) = ∫ x ~ ( ϕ + ω ) w ~ ∗ ( ϕ , ω ) e i ϕ f d ϕ
X ( m , n ) = ∑ k x k w ∗ ( k − m ) e − i 2 π k N n X(m, n) = \sum_k x_k w^*(k - m)e^{-i\frac{2\pi k}{N} n}
X ( m , n ) = k ∑ x k w ∗ ( k − m ) e − i N 2 π k n
X ( m , n ) = ∑ k x k w ∗ ( k − m , n ) e − i 2 π k N n X(m, n) = \sum_k x_k w^*(k - m, n)e^{-i\frac{2\pi k}{N} n}
X ( m , n ) = k ∑ x k w ∗ ( k − m , n ) e − i N 2 π k n
STFT中窗口函数不随频率(n)改变而改变,Q变换中窗口随频率而变
Some wavelet transforms are also considered to be constant Q transforms because in the discrete versions of the transforms, the scale of the wavelet is varied exponentially (base being 2 in this case).
A property of wavelet transforms is that they have build in the constant Q-factor property, or in other words logarithmic scaling.
其他时频分析方法
S变换 S-Transform / Stockwell Transform (Stockwell 1994)∝ 1 / ∣ ω ∣ \propto 1/|\omega| ∝ 1 / ∣ ω ∣ ∣ ω ∣ |\omega| ∣ ω ∣
S T x ( t , ω ) = ∫ x ( τ ) ∣ ω ∣ e − π ( τ − t ) 2 ω 2 e − i ω τ d τ ST_x(t,\omega) = \int x(\tau) |\omega| e^{-\pi (\tau-t)^2 \omega^2} e^{-i\omega\tau} d\tau
S T x ( t , ω ) = ∫ x ( τ ) ∣ ω ∣ e − π ( τ − t ) 2 ω 2 e − i ω τ d τ
韦格纳分布 Wigner Distribution(Wigner 1932)
W x ( t , ω ) = ∫ x ( t + τ 2 ) x ∗ ( t − τ 2 ) e − i ω τ d τ W_x(t, \omega) = \int x(t + \frac{\tau}{2})x^*(t-\frac{\tau}{2}) e^{-i \omega \tau} d\tau
W x ( t , ω ) = ∫ x ( t + 2 τ ) x ∗ ( t − 2 τ ) e − i ω τ d τ
time frequency amplitude 时频谱 Hilbert谱https://zhuanlan.zhihu.com/p/25250010
经验模态分解EMD(Empirical Mode Decomposition)对简单信号的定义为本征模函数IMF(Intrinsic Mode Functions),满足两个要求,第一要震荡,极值点的个数和过零的个数相等或差1,第二,任何一个点都有局部的关于零的对称性。EMD方法可以说是自适应信号处理方法的代表方法,他开创了自适应数据驱动分解方法分析的时代。现有大量研究者在自适应信号处理领域耕耘,不过很遗憾,该方法到目前为止还没有理论基础。但是,该方法的实验研究表明,该方法具有广泛的通用性,同时开辟了自适应信号处理新领域,大量自适应信号处理方法都基于EMD的思想。例如(ITD,SWT,EWT,VMD,NSP等等方法)。
各IMF为平稳态分量,且包含了原信号的不同时间尺度的局部特征
经过EMD分解出的IMF分量再经过Hilbert变换,最终得到信号瞬时频率和瞬时幅值”的方法叫做希尔伯特黄变换(HHT,Hilbert-Huang Transform)。
时频分析与小波变换-台大
The Story of Wavelets An Introduction to Wavelets Jean Morlet and the Continuous Wavelet Transform (CWT) High Resolution Time-Frequency Representations for RF Signals Fourier, Gabor, Morlet or Wigner: Comparison of Time-Frequency Transforms
A Really Friendly Guide To Wavelets A Really Friendly Guide To Wavelets